计算机视觉应用
Ascend GPU 全流程 初级 中级 高级
![]()
![]()
概述
计算机视觉是当前深度学习研究最广泛、落地最成熟的技术领域,在手机拍照、智能安防、自动驾驶等场景有广泛应用。从2012年AlexNet在ImageNet比赛夺冠以来,深度学习深刻推动了计算机视觉领域的发展,当前最先进的计算机视觉算法几乎都是深度学习相关的。深度神经网络可以逐层提取图像特征,并保持局部不变性,被广泛应用于分类、检测、分割、检索、识别、提升、重建等视觉任务中。
本章结合图像分类任务,介绍MindSpore如何应用于计算机视觉场景。
图像分类
图像分类是最基础的计算机视觉应用,属于有监督学习类别。给定一张数字图像,判断图像所属的类别,如猫、狗、飞机、汽车等等。用函数来表示这个过程如下:
def classify(image):
label = model(image)
return label
选择合适的model是关键。这里的model一般指的是深度卷积神经网络,如AlexNet、VGG、GoogLeNet、ResNet等等。
MindSpore实现了典型的卷积神经网络,开发者可以参考model_zoo。
MindSpore当前支持的图像分类网络包括:典型网络LeNet、AlexNet、ResNet。
任务描述及准备
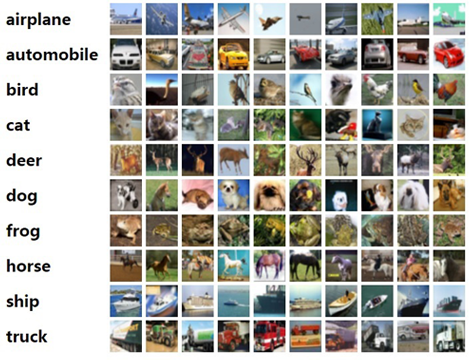
图1:CIFAR-10数据集[1]
如图1所示,CIFAR-10数据集共包含10类、共60000张图片。其中,每类图片6000张,50000张是训练集,10000张是测试集。每张图片大小为32*32。
图像分类的训练指标通常是精度(Accuracy),即正确预测的样本数占总预测样本数的比值。
接下来我们介绍利用MindSpore解决图片分类任务,整体流程如下:
下载CIFAR-10数据集
数据加载和预处理
定义卷积神经网络,本例采用ResNet-50网络
定义损失函数和优化器
调用
Model高阶API进行训练和保存模型文件加载保存的模型进行推理
本例面向Ascend 910 AI处理器硬件平台,你可以在这里下载完整的样例代码:https://gitee.com/mindspore/docs/blob/r0.7/tutorials/tutorial_code/resnet
下面对任务流程中各个环节及代码关键片段进行解释说明。
下载CIFAR-10数据集
先从CIFAR-10数据集官网上下载CIFAR-10数据集。本例中采用binary格式的数据,Linux环境可以通过下面的命令下载:
wget https://www.cs.toronto.edu/~kriz/cifar-10-binary.tar.gz
接下来需要解压数据集,解压命令如下:
tar -zvxf cifar-10-binary.tar.gz
数据预加载和预处理
加载数据集
数据加载可以通过内置数据集格式
Cifar10Dataset接口完成。Cifar10Dataset,读取类型为随机读取,内置CIFAR-10数据集,包含图像和标签,图像格式默认为uint8,标签数据格式默认为uint32。更多说明请查看API中Cifar10Dataset接口说明。数据加载代码如下,其中
data_home为数据存储位置:cifar_ds = ds.Cifar10Dataset(data_home)
数据增强
数据增强主要是对数据进行归一化和丰富数据样本数量。常见的数据增强方式包括裁剪、翻转、色彩变化等等。MindSpore通过调用
map方法在图片上执行增强操作:resize_height = 224 resize_width = 224 rescale = 1.0 / 255.0 shift = 0.0 # define map operations random_crop_op = C.RandomCrop((32, 32), (4, 4, 4, 4)) # padding_mode default CONSTANT random_horizontal_op = C.RandomHorizontalFlip() resize_op = C.Resize((resize_height, resize_width)) # interpolation default BILINEAR rescale_op = C.Rescale(rescale, shift) normalize_op = C.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)) changeswap_op = C.HWC2CHW() type_cast_op = C2.TypeCast(mstype.int32) c_trans = [] if training: c_trans = [random_crop_op, random_horizontal_op] c_trans += [resize_op, rescale_op, normalize_op, changeswap_op] # apply map operations on images cifar_ds = cifar_ds.map(input_columns="label", operations=type_cast_op) cifar_ds = cifar_ds.map(input_columns="image", operations=c_trans)
数据混洗和批处理
最后通过数据混洗(
shuffle)随机打乱数据的顺序,并按batch读取数据,进行模型训练:# apply shuffle operations cifar_ds = cifar_ds.shuffle(buffer_size=10) # apply batch operations cifar_ds = cifar_ds.batch(batch_size=args_opt.batch_size, drop_remainder=True) # apply repeat operations cifar_ds = cifar_ds.repeat(repeat_num)
定义卷积神经网络
卷积神经网络已经是图像分类任务的标准算法了。卷积神经网络采用分层的结构对图片进行特征提取,由一系列的网络层堆叠而成,比如卷积层、池化层、激活层等等。
ResNet通常是较好的选择。首先,它足够深,常见的有34层,50层,101层。通常层次越深,表征能力越强,分类准确率越高。其次,可学习,采用了残差结构,通过shortcut连接把低层直接跟高层相连,解决了反向传播过程中因为网络太深造成的梯度消失问题。此外,ResNet网络的性能很好,既表现为识别的准确率,也包括它本身模型的大小和参数量。
MindSpore Model Zoo中已经实现了ResNet模型,可以采用ResNet-50。调用方法如下:
network = resnet50(class_num=10)
更多ResNet的介绍请参考:ResNet论文
定义损失函数和优化器
接下来需要定义损失函数(Loss)和优化器(Optimizer)。损失函数是深度学习的训练目标,也叫目标函数,可以理解为神经网络的输出(Logits)和标签(Labels)之间的距离,是一个标量数据。
常见的损失函数包括均方误差、L2损失、Hinge损失、交叉熵等等。图像分类应用通常采用交叉熵损失(CrossEntropy)。
优化器用于神经网络求解(训练)。由于神经网络参数规模庞大,无法直接求解,因而深度学习中采用随机梯度下降算法(SGD)及其改进算法进行求解。MindSpore封装了常见的优化器,如SGD、ADAM、Momemtum等等。本例采用Momentum优化器,通常需要设定两个参数,动量(moment)和权重衰减项(weight decay)。
MindSpore中定义损失函数和优化器的代码样例如下:
# loss function definition
ls = SoftmaxCrossEntropyWithLogits(sparse=True, is_grad=False, reduction="mean")
# optimization definition
opt = Momentum(filter(lambda x: x.requires_grad, net.get_parameters()), 0.01, 0.9)
调用Model高阶API进行训练和保存模型文件
完成数据预处理、网络定义、损失函数和优化器定义之后,就可以进行模型训练了。模型训练包含两层迭代,数据集的多轮迭代(epoch)和一轮数据集内按分组(batch)大小进行的单步迭代。其中,单步迭代指的是按分组从数据集中抽取数据,输入到网络中计算得到损失函数,然后通过优化器计算和更新训练参数的梯度。
为了简化训练过程,MindSpore封装了Model高阶接口。用户输入网络、损失函数和优化器完成Model的初始化,然后调用train接口进行训练,train接口参数包括迭代次数(epoch)和数据集(dataset)。
模型保存是对训练参数进行持久化的过程。Model类中通过回调函数(callback)的方式进行模型保存,如下面代码所示。用户通过CheckpointConfig设置回调函数的参数,其中,save_checkpoint_steps指每经过固定的单步迭代次数保存一次模型,keep_checkpoint_max指最多保存的模型个数。
'''
network, loss, optimizer are defined before.
batch_num, epoch_size are training parameters.
'''
model = Model(net, loss_fn=ls, optimizer=opt, metrics={'acc'})
# CheckPoint CallBack definition
config_ck = CheckpointConfig(save_checkpoint_steps=batch_num, keep_checkpoint_max=35)
ckpoint_cb = ModelCheckpoint(prefix="train_resnet_cifar10", directory="./", config=config_ck)
# LossMonitor is used to print loss value on screen
loss_cb = LossMonitor()
model.train(epoch_size, dataset, callbacks=[ckpoint_cb, loss_cb])
加载保存的模型,并进行验证
训练得到的模型文件(如resnet.ckpt)可以用来预测新图像的类别。首先通过load_checkpoint加载模型文件。然后调用Model的eval接口预测新图像类别。
param_dict = load_checkpoint(args_opt.checkpoint_path)
load_param_into_net(net, param_dict)
eval_dataset = create_dataset(training=False)
res = model.eval(eval_dataset)
print("result: ", res)