流水线并行
![]()
概述
近年来,神经网络的规模几乎是呈指数型增长。受单卡内存的限制,训练这些大模型用到的设备数量也在不断增加。受server间通信带宽低的影响,传统数据并行叠加模型并行的这种混合并行模式的性能表现欠佳,需要引入流水线并行。流水线并行能够将模型在空间上按阶段(Stage)进行切分,每个Stage只需执行网络的一部分,大大节省了内存开销,同时缩小了通信域,缩短了通信时间。MindSpore能够根据用户的配置,将单机模型自动地转换成流水线并行模式去执行。
流水线并行模型支持的硬件平台包括Ascend、GPU,需要在Graph模式下运行。
相关接口:
mindspore.set_auto_parallel_context(parallel_mode=ParallelMode.SEMI_AUTO_PARALLEL, pipeline_stages=NUM):设置半自动并行模式,且设置pipeline_stages用来表明Stage的总数为NUM,必须在初始化网络之前调用。nn.PipelineCell(loss_cell, micro_size):流水线并行需要在LossCell外再包一层PipelineCell,并指定MicroBatch的size。为了提升机器的利用率,MindSpore将MiniBatch切分成了更细粒度的MicroBatch,最终的loss则是所有MicroBatch计算的loss值累加。其中,MicroBatch的size必须大于等于Stage的数量。
基本原理
流水线(Pipeline)并行是将神经网络中的算子切分成多个Stage,再把Stage映射到不同的设备上,使得不同设备去计算神经网络的不同部分。流水线并行适用于模型是线性的图结构。如图1所示,将4层MatMul的网络切分成4个Stage,分布到4台设备上。正向计算时,每台机器在算完本台机器上的MatMul之后将结果通过通信算子发送(Send)给下一台机器,同时,下一台机器通过通信算子接收(Receive)上一台机器的MatMul结果,同时开始计算本台机器上的MatMul;反向计算时,最后一台机器的梯度算完之后,将结果发送给上一台机器,同时,上一台机器接收最后一台机器的梯度结果,并开始计算本台机器的反向。
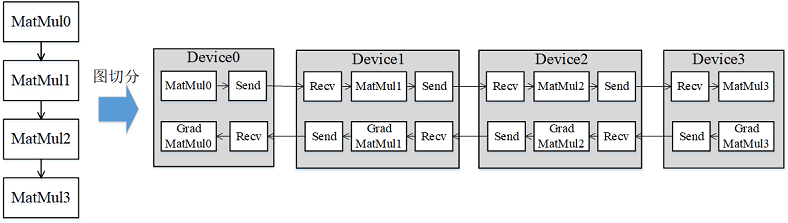
图1:流水线并行的图切分示意图
简单地将模型切分到多设备上并不会带来性能的提升,因为模型的线性结构到时同一时刻只有一台设备在工作,而其它设备在等待,造成了资源的浪费。为了提升效率,流水线并行进一步将小批次(MiniBatch)切分成更细粒度的微批次(MicroBatch),在微批次中采用流水线式的执行序,从而达到提升效率的目的,如图2所示。将小批次切分成4个微批次,4个微批次在4个组上执行形成流水线。微批次的梯度汇聚后用来更新参数,其中每台设备只存有并更新对应组的参数。其中白色序号代表微批次的索引。
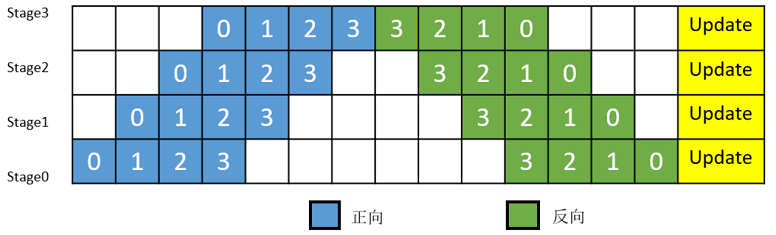
图2:带MicroBatch的流水线并行执行时间线示意图
MindSpore的流水线并行实现中对执行序进行了调整,来达到更优的内存管理。如图3所示,在编号为0的MicroBatch的正向执行完后立即执行其反向,这样做使得编号为0的MicroBatch的中间结果的内存得以更早地(相较于图2)释放,进而确保内存使用的峰值比图2的方式更低。
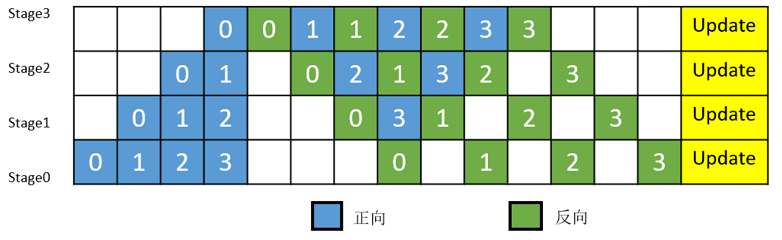
图3:MindSpore流水线并行执行时间线示意图
操作实践
下面以Ascend或者GPU单机8卡为例,进行流水线并行操作说明:
样例代码说明
下载完整的样例代码:distributed_pipeline_parallel。
目录结构如下:
└─ sample_code
├─ distributed_pipeline_parallel
├── distributed_pipeline_parallel.py
└── run.sh
...
其中,distributed_pipeline_parallel.py是定义网络结构和训练过程的脚本。run.sh是执行脚本。
配置分布式环境
通过context接口指定运行模式、运行设备、运行卡号等,与单卡脚本不同,并行脚本还需指定并行模式parallel_mode为半自动并行模式,并通过init初始化HCCL或NCCL通信。此外,还需配置pipeline_stages=2指定Stage的总数。此处不设置device_target会自动指定为MindSpore包对应的后端硬件设备。
import mindspore as ms
from mindspore.communication import init
ms.set_context(mode=ms.GRAPH_MODE)
ms.set_auto_parallel_context(parallel_mode=ms.ParallelMode.SEMI_AUTO_PARALLEL, pipeline_stages=2)
init()
ms.set_seed(1)
数据集加载
在流水线并行场景下,数据集加载方式与单卡加载方式一致,代码如下:
import os
import mindspore.dataset as ds
def create_dataset(batch_size):
dataset_path = os.getenv("DATA_PATH")
dataset = ds.MnistDataset(dataset_path)
image_transforms = [
ds.vision.Rescale(1.0 / 255.0, 0),
ds.vision.Normalize(mean=(0.1307,), std=(0.3081,)),
ds.vision.HWC2CHW()
]
label_transform = ds.transforms.TypeCast(ms.int32)
dataset = dataset.map(image_transforms, 'image')
dataset = dataset.map(label_transform, 'label')
dataset = dataset.batch(batch_size)
return dataset
data_set = create_dataset(32)
定义网络
流水线并行网络结构与单卡网络结构基本一致,区别在于增加了流水线并行策略配置。流水线并行需要用户去定义并行的策略,通过调用pipeline_stage接口来指定每个layer要在哪个stage上去执行。pipeline_stage接口的粒度为Cell。所有包含训练参数的Cell都需要配置pipeline_stage,并且pipeline_stage要按照网络执行的先后顺序,从小到大进行配置。在单卡模型基础上,增加pipeline_stage配置后如下:
from mindspore import nn
class Network(nn.Cell):
def __init__(self):
super().__init__()
self.flatten = nn.Flatten()
self.layer1 = nn.Dense(28*28, 512)
self.relu1= nn.ReLU()
self.layer2 = nn.Dense(512, 512)
self.relu2= nn.ReLU()
self.layer3 = nn.Dense(512, 10)
def construct(self, x):
x = self.flatten(x)
x = self.layer1(x)
x = self.relu1(x)
x = self.layer2(x)
x = self.relu2(x)
logits = self.layer3(x)
return logits
net = Network()
net.layer1.pipeline_stage = 0
net.relu1.pipeline_stage = 0
net.layer2.pipeline_stage = 0
net.relu2.pipeline_stage = 1
net.layer3.pipeline_stage = 1
训练网络
在这一步,我们需要定义损失函数、优化器以及训练过程,与单卡模型不同,在这部分需要调用两个接口来配置流水线并行:
首先需要定义LossCell,本例中调用了
nn.WithLossCell接口封装网络和损失函数。然后需要在LossCell外包一层
nn.PipelineCell,并指定MicroBatch的size。详细请参考本章概述中的相关接口。
import mindspore as ms
from mindspore import nn, train
optimizer = nn.SGD(net.trainable_params(), 1e-2)
loss_fn = nn.CrossEntropyLoss()
loss_cb = train.LossMonitor()
net_with_grads = nn.PipelineCell(nn.WithLossCell(net, loss_fn), 4)
model = ms.Model(net_with_grads, optimizer=optimizer)
model.train(10, data_set, callbacks=[loss_cb], dataset_sink_mode=True)
目前流水线并行不支持自动混合精度特性。
流水线并行训练更适合用
model.train的方式,这是因为流水线并行下的TrainOneStep逻辑复杂,而model.train内部封装了针对流水线并行的TrainOneStepCell,易用性更好。
运行单机8卡脚本
接下来通过命令调用对应的脚本,以mpirun启动方式,8卡的分布式训练脚本为例,进行分布式训练:
bash run.sh
训练完后,日志文件保存到log_output目录下,其中部分文件目录结构如下:
└─ log_output
└─ 1
├─ rank.0
| └─ stdout
├─ rank.1
| └─ stdout
...
结果保存在log_output/1/rank.*/stdout中,示例如下:
epoch: 1 step: 1875, loss is 1.9490933418273926
epoch: 2 step: 1875, loss is 0.44548869132995605
epoch: 3 step: 1875, loss is 0.034527599811553955
epoch: 4 step: 1875, loss is 1.0163589715957642
epoch: 5 step: 1875, loss is 0.02109396457672119
epoch: 6 step: 1875, loss is 0.012739777565002441
epoch: 7 step: 1875, loss is 0.004988193511962891
epoch: 8 step: 1875, loss is 0.10372555255889893
epoch: 9 step: 1875, loss is 0.019182920455932617
epoch: 10 step: 1875, loss is 0.021012544631958008
其他启动方式如动态组网、rank table的启动可参考启动方式。