Navier-Stokes方程反问题
![]()
![]()
![]()
本案例要求MindSpore版本 >= 2.0.0调用如下接口: mindspore.jit,mindspore.jit_class,mindspore.jacrev。
概述
Navier-Stokes方程是一组描述流体力学中流体速度和压力变化的偏微分方程。Navier-Stokes的反问题是指,在已知某些流体运动特征(如流量、速度等)的条件下,求解出能够产生这些运动特征的流体性质(如黏度、密度等)和流体边界条件(如壁面摩擦力等)的问题。与正问题(即已知流体性质和边界条件,求解流体的运动特征)不同,反问题的解决需要通过数值优化和逆推算法等方法进行求解。
Navier-Stokes的反问题在工程和科学计算中具有广泛的应用,例如在航空、能源、地质、生物等领域中,可以用于优化流体设计、预测流体运动、诊断流体问题等。尽管Navier-Stokes的反问题非常具有挑战性,但是近年来随着计算机技术和数值方法的发展,已经取得了一定的进展。例如,可以通过使用高性能计算和基于机器学习的逆推算法等技术,加速反问题的求解过程,并提高求解精度。
问题描述
与Navier-Stokes方程不同的是,在Navier-Stokes方程反问题中,存在两个未知的参数。Navier-Stokes方程的反问题形式如下:
其中
本案例利用PINNs方法学习位置和时间到相应流场物理量的映射,求解两个参数。
技术路径
MindSpore Flow求解该问题的具体流程如下:
创建数据集。
构建模型。
优化器。
InvNavierStokes。
模型训练。
模型推理及可视化。
[1]:
import time
import numpy as np
import mindspore
from mindspore import context, nn, ops, jit, set_seed, load_checkpoint, load_param_into_net
下述 src 包可以在applications/physics_driven/navier_stokes/cylinder_flow_inverse/src 下载。
[2]:
from mindflow.cell import MultiScaleFCSequential
from mindflow.utils import load_yaml_config
from mindflow.pde import sympy_to_mindspore, PDEWithLoss
from mindflow.loss import get_loss_metric
from src import create_training_dataset, create_test_dataset, calculate_l2_error
set_seed(123456)
np.random.seed(123456)
下述inverse_navier_stokes.yaml文件可以在applications/physics_driven/navier_stokes/cylinder_flow_inverse/configs/navier_stokes_inverse.yaml下载。
[3]:
# set context for training: using graph mode for high performance training with GPU acceleration
config = load_yaml_config('inverse_navier_stokes.yaml')
context.set_context(mode=context.GRAPH_MODE, device_target="GPU", device_id=0)
use_ascend = context.get_context(attr_key='device_target') == "Ascend"
创建数据集
在本案例中,训练数据和测试数据均从原数据中取样得到。
下载训练与测试数据集:physics_driven/inverse_navier_stokes/dataset。
[4]:
# create dataset
inv_ns_train_dataset = create_training_dataset(config)
train_dataset = inv_ns_train_dataset.create_dataset(batch_size=config["train_batch_size"],
shuffle=True,
prebatched_data=True,
drop_remainder=True)
# create test dataset
inputs, label = create_test_dataset(config)
./inverse_navier_stokes/dataset
get dataset path: ./inverse_navier_stokes/dataset
check eval dataset length: (40, 100, 50, 3)
构建模型
本示例使用一个简单的全连接网络,深度为6层,激活函数是tanh函数,每层有20个神经元。
[5]:
coord_min = np.array(config["geometry"]["coord_min"] + [config["geometry"]["time_min"]]).astype(np.float32)
coord_max = np.array(config["geometry"]["coord_max"] + [config["geometry"]["time_max"]]).astype(np.float32)
input_center = list(0.5 * (coord_max + coord_min))
input_scale = list(2.0 / (coord_max - coord_min))
model = MultiScaleFCSequential(in_channels=config["model"]["in_channels"],
out_channels=config["model"]["out_channels"],
layers=config["model"]["layers"],
neurons=config["model"]["neurons"],
residual=config["model"]["residual"],
act='tanh',
num_scales=1,
input_scale=input_scale,
input_center=input_center)
优化器
在构建优化器时,两个未知参数与模型的参数一起放入优化器中训练。
[6]:
if config["load_ckpt"]:
param_dict = load_checkpoint(config["load_ckpt_path"])
load_param_into_net(model, param_dict)
theta = mindspore.Parameter(mindspore.Tensor(np.array([0.0, 0.0]).astype(np.float32)), name="theta", requires_grad=True)
params = model.trainable_params()
params.append(theta)
optimizer = nn.Adam(params, learning_rate=config["optimizer"]["initial_lr"])
模型训练
使用MindSpore >= 2.0.0的版本,可以使用函数式编程范式训练神经网络。
[8]:
def train():
problem = InvNavierStokes(model, params)
if use_ascend:
from mindspore.amp import DynamicLossScaler, auto_mixed_precision, all_finite
loss_scaler = DynamicLossScaler(1024, 2, 100)
auto_mixed_precision(model, 'O3')
def forward_fn(pde_data, train_points, train_label):
loss = problem.get_loss(pde_data, train_points, train_label)
if use_ascend:
loss = loss_scaler.scale(loss)
return loss
grad_fn = ops.value_and_grad(forward_fn, None, optimizer.parameters, has_aux=False)
@jit
def train_step(pde_data, train_points, train_label):
loss, grads = grad_fn(pde_data, train_points, train_label)
if use_ascend:
loss = loss_scaler.unscale(loss)
if all_finite(grads):
grads = loss_scaler.unscale(grads)
loss = ops.depend(loss, optimizer(grads))
else:
loss = ops.depend(loss, optimizer(grads))
return loss
epochs = config["train_epochs"]
steps_per_epochs = train_dataset.get_dataset_size()
sink_process = mindspore.data_sink(train_step, train_dataset, sink_size=1)
param1_hist = []
param2_hist = []
for epoch in range(1, 1 + epochs):
# train
time_beg = time.time()
model.set_train(True)
for _ in range(steps_per_epochs):
step_train_loss = sink_process()
print(f"epoch: {epoch} train loss: {step_train_loss} epoch time: {(time.time() - time_beg) * 1000 :.3f} ms")
model.set_train(False)
if epoch % config["eval_interval_epochs"] == 0:
# if epoch % 10 ==0:
print(f"Params are{params[-1].value()}")
param1_hist.append(params[-1].value()[0])
param2_hist.append(params[-1].value()[1])
calculate_l2_error(model, inputs, label, config)
[1]:
start_time = time.time()
train()
print("End-to-End total time: {} s".format(time.time() - start_time))
momentum_x: theta1*u(x, y, t)*Derivative(u(x, y, t), x) + theta1*v(x, y, t)*Derivative(u(x, y, t), y) - theta2*Derivative(u(x, y, t), (x, 2)) - theta2*Derivative(u(x, y, t), (y, 2)) + Derivative(p(x, y, t), x) + Derivative(u(x, y, t), t)
Item numbers of current derivative formula nodes: 6
momentum_y: theta1*u(x, y, t)*Derivative(v(x, y, t), x) + theta1*v(x, y, t)*Derivative(v(x, y, t), y) - theta2*Derivative(v(x, y, t), (x, 2)) - theta2*Derivative(v(x, y, t), (y, 2)) + Derivative(p(x, y, t), y) + Derivative(v(x, y, t), t)
Item numbers of current derivative formula nodes: 6
continuty: Derivative(u(x, y, t), x) + Derivative(v(x, y, t), y)
Item numbers of current derivative formula nodes: 2
velocity_u: u(x, y, t)
Item numbers of current derivative formula nodes: 1
velocity_v: v(x, y, t)
Item numbers of current derivative formula nodes: 1
p: p(x, y, t)
Item numbers of current derivative formula nodes: 1
epoch: 100 train loss: 0.04028289 epoch time: 2229.404 ms
Params are[-0.09575531 0.00106778]
predict total time: 652.7423858642578 ms
l2_error, U: 0.17912744544874443 , V: 1.0003739133641472 , P: 0.7065071079210473 , Total: 0.3464922229721188
==================================================================================================
epoch: 200 train loss: 0.036820486 epoch time: 1989.347 ms
Params are[-0.09443577 0.00024772]
predict total time: 205.59978485107422 ms
l2_error, U: 0.17490993243690725 , V: 1.0000642916277709 , P: 0.7122513574462407 , Total: 0.3447007384838206
==================================================================================================
epoch: 300 train loss: 0.038683612 epoch time: 2111.895 ms
Params are[-0.08953815 0.00040177]
predict total time: 222.2282886505127 ms
l2_error, U: 0.17713679346188396 , V: 1.000105316860139 , P: 0.718292536660169 , Total: 0.34596943008999737
==================================================================================================
Params are[-0.08414971 0.00108538]
predict total time: 183.55488777160645 ms
l2_error, U: 0.17421055947839162 , V: 1.0021844256262489 , P: 0.7172107774589106 , Total: 0.34508045682750343
... ...
epoch: 9700 train loss: 0.00012139356 epoch time: 1816.661 ms
Params are[0.9982705 0.01092069]
predict total time: 126.16825103759766 ms
l2_error, U: 0.010509542864484654 , V: 0.023635759087951035 , P: 0.029506766787788633 , Total: 0.012708719069239902
==================================================================================================
epoch: 9800 train loss: 0.00013328926 epoch time: 1790.342 ms
Params are[0.9984688 0.01081933]
predict total time: 121.35672569274902 ms
l2_error, U: 0.009423471629415427 , V: 0.034303037318821124 , P: 0.03254805487768195 , Total: 0.01400324770722587
==================================================================================================
epoch: 9900 train loss: 0.00013010873 epoch time: 1805.052 ms
Params are[0.9978893 0.01079915]
predict total time: 125.68926811218262 ms
l2_error, U: 0.009608467956285763 , V: 0.02630037021521753 , P: 0.029346654211944684 , Total: 0.012485673337358347
==================================================================================================
epoch: 10000 train loss: 0.00010107973 epoch time: 1809.868 ms
Params are[0.9984444 0.01072927]
predict total time: 132.6577663421631 ms
l2_error, U: 0.008157992439025805 , V: 0.022894215240181922 , P: 0.028113136535916225 , Total: 0.010848400336992805
==================================================================================================
End-to-End total time: 27197.875846385956 s
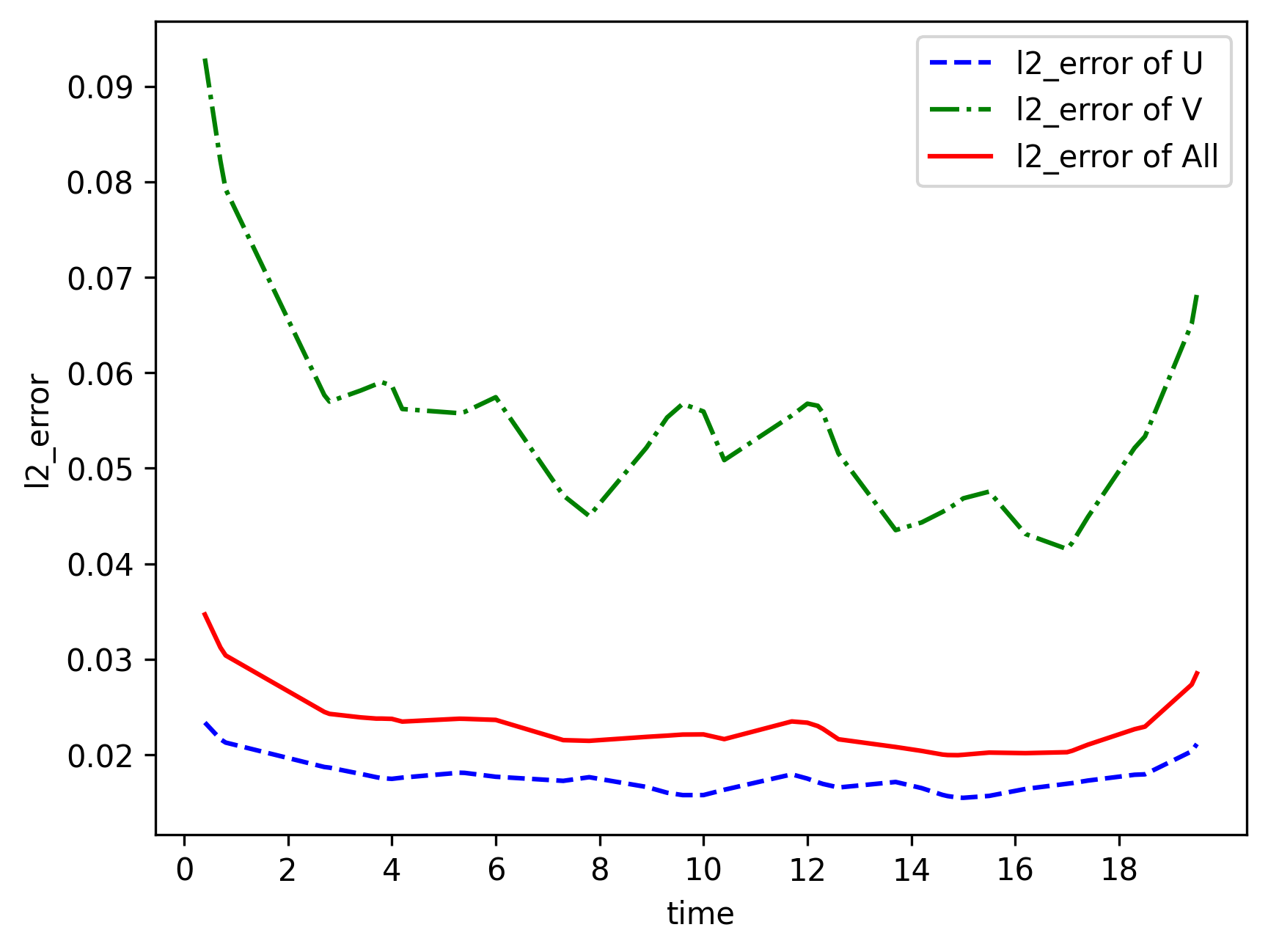
模型推理及可视化
训练后可对流场内所有数据点进行推理,并可视化相关结果。
[2]:
from src import visual
# visualization
visual(model=model, epochs=config["train_epochs"], input_data=inputs, label=label)
[3]:
from src import plot_params
plot_params(param1_hist, param2_hist)
Text(0, 0.5, 'value')
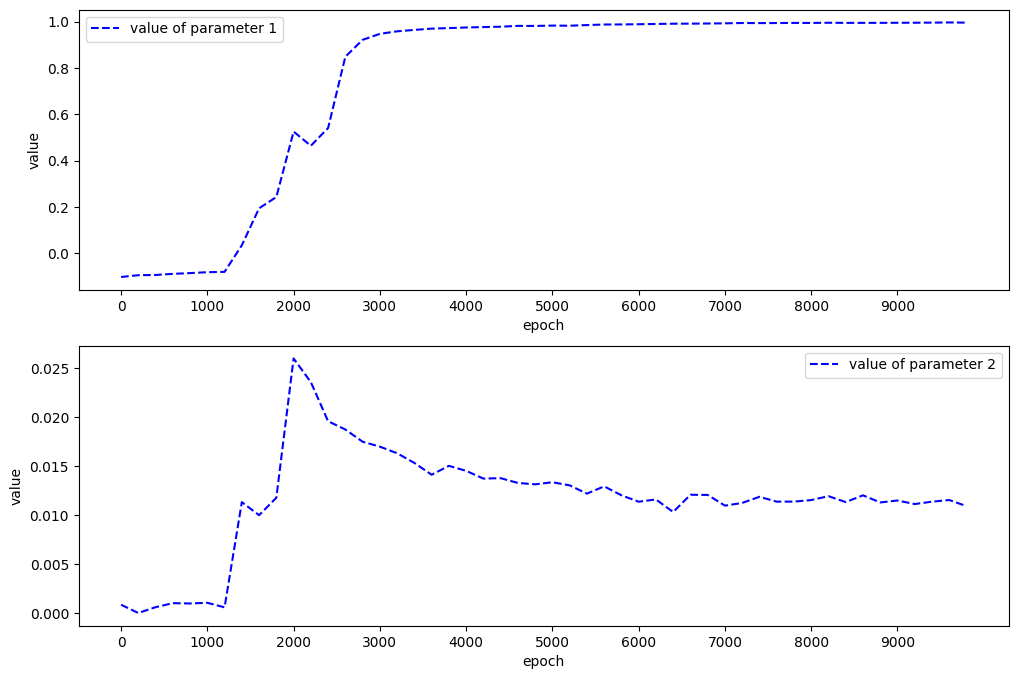
在本案例中,
Correct PDE:
Identified PDE: