典型算子或接口区别介绍
![]()
接口类
torch.device
PyTorch 在构建模型时,通常会利用 torch.device 指定模型和数据绑定的设备,是在 CPU 还是 GPU 上,如果支持多 GPU,还可以指定具体的 GPU 序号。绑定相应的设备后,需要将模型和数据部署到对应设备,代码如下:
# bind to the GPU 0 if GPU is available, otherwise bind to CPU
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") # 单 GPU 或者 CPU
# deploy model to specified hardware
model.to(device)
# deploy data to specified hardware
data.to(device)
# distribute training on multiple GPUs
if torch.cuda.device_count() > 1:
model = nn.DataParallel(model, device_ids=[0,1,2])
model.to(device)
# set available device
os.environ['CUDA_VISIBLE_DEVICE']='1'
model.cuda()
而在 MindSpore 中,我们通过 context 中 的 device_target 参数 指定模型绑定的设备,device_id 指定设备的序号。与 PyTorch 不同的是,一旦设备设置成功,输入数据和模型会默认拷贝到指定的设备中执行,不需要也无法再改变数据和模型所运行的设备类型。代码如下:
from mindspore import context
context.set_context(device_target='Ascend', device_id=0)
# define net
Model = ..
# define dataset
dataset = ..
# training, automatically deploy to Ascend according to device_target
Model.train(1, dataset)
此外,网络运行后返回的 Tensor 默认均拷贝到 CPU 设备,可以直接对该 Tensor 进行访问和修改,包括转成 numpy 格式,无需像 PyTorch 一样需要要先执行 tensor.cpu 再转换成 numpy 格式。
nn.Module
使用 PyTorch 构建网络结构时,我们会用到 nn.Module 类,通常将网络中的元素定义在 __init__ 函数中并对其初始化,将网络的图结构表达定义在 forward 函数中,通过调用这些类的对象完成整个模型的构建和训练。nn.Module 不仅为我们提供了构建图接口,它还为我们提供了一些常用的 API ,来帮助我们执行更复杂逻辑。
MindSpore 中的 nn.Cell 类发挥着和 PyTorch 中 nn.Module 相同的作用,都是用来构建图结构的模块,MindSpore 也同样提供了丰富的 API 供开发者使用,虽然名字不能一一对应,但 nn.Module 中常用的功能都可以在 nn.Cell 中找到映射。
以几个常用方法为例:
常用方法 |
nn.Module |
nn.Cell |
|---|---|---|
获取子元素 |
named_children |
cells_and_names |
添加子元素 |
add_module |
insert_child_to_cell |
获取元素的参数 |
parameters |
get_parameters |
数据对象
在 PyTorch 中,可以存储数据的对象总共有四种,分别时 Tensor、Variable、Parameter、Buffer。这四种对象的默认行为均不相同,当我们不需要求梯度时,通常使用 Tensor 和 Buffer 两类数据对象,当我们需要求梯度时,通常使用 Variable 和 Parameter 两类对象。PyTorch 在设计这四种数据对象时,功能上存在冗余(Variable 后续会被废弃也说明了这一点)。
MindSpore 优化了数据对象的设计逻辑,仅保留了两种数据对象:Tensor 和 Parameter,其中 Tensor 对象仅参与运算,并不需要对其进行梯度求导和参数更新,而 Parameter 数据对象和 PyTorch 的 Parameter 意义相同,会根据其属性 requires_grad 来决定是否对其进行梯度求导和 参数更新。 在网络迁移时,只要是在 PyTorch 中未进行参数更新的数据对象,均可在 MindSpore 中声明为 Tensor。
梯度求导
梯度求导涉及的算子和接口差异主要是由 MindSpore 和 PyTorch 自动微分原理不同引起的。
torch.no_grad
在 PyTorch 中,默认情况下,执行正向计算时会记录反向传播所需的信息,在推理阶段或无需反向传播网络中,这一操作是冗余的,会额外耗时,因此,PyTorch 提供了 torch.no_grad 来取消该过程。
而 MindSpore 只有在调用 GradOperation 才会根据正向图结构来构建反向图,正向执行时不会记录任何信息,所以 MindSpore 并不需要该接口,也可以理解为 MindSpore 的正向计算均在 torch.no_grad 情况下进行的。
retain_graph
由于 PyTorch 是基于函数式的自动微分,所以默认每次执行完反向传播后都会自动清除记录的信息,从而进行下一次迭代。这就会导致当我们想再次利用这些反向图和梯度信息时,由于已被删除而获取失败。因此,PyTorch 提供了 backward(retain_graph=True) 来主动保留这些信息。
而 MindSpore 则不需要这个功能,MindSpore 是基于计算图的自动微分,反向图信息在调用 GradOperation 后便永久的记录在计算图中,只要再次调用计算图就可以获取梯度信息。
高阶导数
基于计算图的自动微分还有一个好处,我们可以很方便的实现高阶求导。第一次对正向图执行 GradOperation 操作后,我们可以得到一阶导,此时计算图被更新为正向图+一阶导的反向图结构,但我们再次对更新后的计算图执行 GradOperation 后,我们就可以得到二阶导,以此类推,通过基于计算图的自动微分,我们很容易求得一个网络的高阶导数。
算子类
MindSpore 的大部分算子 API 和 TensorFlow 相近,但也有一部分算子的默认行为与 PyTorch 或 TensorFlow 存在差异。开发者在做网络脚本迁移时,如果未注意到这些差异,直接使用默认行为,很容易出现与原迁移网络不一致的情况,影响网络训练,我们建议开发者在迁移网络时不仅对齐使用的算子,也要对齐算子的属性。这里我们总结了几个常见的差异算子。
参数意义不同
nn.Dropout
Dropout 常用于防止训练过拟合,有一个重要的 概率值 参数,该参数在 MindSpore 中的意义与 PyTorch 和 TensorFlow 中的意义完全相反。
在 MindSpore 中,概率值对应 Dropout 算子的属性 keep_prob,是指输入被保留的概率,1-keep_prob是指输入被置 0 的概率。
在 PyTorch 和 TensorFlow 中,概率值分别对应 Dropout 算子的属性 p和 rate,是指输入被置 0 的概率,与 MindSpore.nn.Dropout 中的 keep_prob 意义相反。
更多信息请参考链接: MindSpore Dropout 、 PyTorch Dropout 、 TensorFlow Dropout
nn.BatchNorm2d
BatchNorm 是 CV 领域比较特殊的正则化方法,它在训练和推理的过程中有着不同计算流程,通常由算子属性控制。MindSpore 和 PyTorch 的 BatchNorm 在这一点上使用了两种不同的参数组。
差异一
torch.nn.BatchNorm2d在不同参数下的状态training
track_running_stats
状态
True
True
期望中训练的状态,running_mean 和 running_var 会跟踪整个训练过程中 batch 的统计特性,而每组输入数据用当前 batch 的 mean 和 var 统计特性做归一化,然后再更新 running_mean 和 running_var。
True
False
每组输入数据会根据当前 batch 的统计特性做归一化,但不会有 running_mean 和 running_var 参数了。
False
Ture
期望中推理的状态,BN 使用 running_mean 和 running_var 做归一化,并且不会对其进行更新。
False
False
效果同第二点,只不过处于推理状态,不会学习 weight 和 bias 两个参数。一般不采用该状态。
mindspore.nn.BatchNorm2d在不同参数下的状态use_batch_statistics
状态
True
期望中训练的状态,moving_mean 和 moving_var 会跟踪整个训练过程中 batch 的统计特性,而每组输入数据用当前 batch 的 mean 和 var 统计特性做归一化,然后再更新 moving_mean 和 moving_var。
Fasle
期望中推理的状态,BN 使用 moving_mean 和 moving_var 做归一化,并且不会对其进行更新。
None
自动设置 use_batch_statistics。如果是训练,use_batch_statistics=True,如果是推理,use_batch_statistics=False。
通过比较可以发现,
mindspore.nn.BatchNorm2d相比torch.nn.BatchNorm2d,少了两种冗余的状态,仅保留了最常用的训练和推理两种状态。差异二
BatchNorm系列算子 的 momentum 参数在 MindSpore 和 PyTorch 表示的意义相反,关系为:
\(momentum_{pytorch} = 1 - momentum_{mindspore}\)
算子行为不同
ops.Transpose
在做轴变换时,PyTorch 常用到两种算子 - Tensor.permute 和 torch.transpose,而 MindSpore 和 TensorFlow 仅提供了 transpose 算子。需要注意的是,Tensor.permute 包含了 torch.transpose 的功能,torch.transpose 仅支持同时交换两个轴,而 Tensor.permute 可以同时变换多个轴。
# pytorch 代码
import numpy as np
import torch
from torch import Tensor
data = np.empty((1, 2, 3, 4)).astype(np.float32)
ret1 = torch.transpose(Tensor(data), dim0=0, dim1=3)
ret1.shape # (4, 2, 3, 1)
ret2 = Tensor(data).permute((3, 2, 1, 0))
ret2.shape # (4, 3, 2, 1)
MindSpore 和 TensorFlow 的 transpose算子功能相同, 虽然名字叫 transpose,但实际可以做多个轴的同时变换,等价于 Tensor.permute。因此,MindSpore 也不再单独提供类似 torch.tranpose 的算子。
# mindspore 代码
import mindspore as ms
import numpy as np
from mindspore import Tensor, ops
ms.context.set_context(device_target="Ascend")
data = np.empty((1, 2, 3, 4)).astype(np.float32)
ret = ops.Transpose()(Tensor(data), (3, 2, 1, 0))
ret.shape # (4, 3, 2, 1)
更多信息请参考链接:MindSpore Transpose 、 PyTorch Transpose 、PyTorch Permute 、 TensforFlow Transpose
Conv 和 Pooling
对于类似卷积和池化的算子,我们知道算子的输出特征图大小依赖输入特征图、步长、kernel_size 和 padding 等变量。
如果 pad_mode 设置为 valid,则输出特征图高和宽的计算公式分别为:

如果 pad_mode(对应 PyTorch 中的属性为 padding,与属性 pad_mode 含义并不相同) 设置为 same 时,有时需要对输入特征图进行自动的 padding 操作,当padding 的元素为偶数时,padding 的元素会均匀分布在特征图的上下左右,此时 MindSpore、PyTorch 和 TensorFlow 中该类算子行为一致。
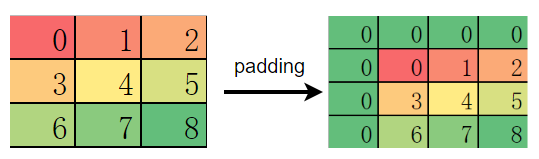
但当 padding 的元素为奇数时,PyTorch 会优先填充在输入特征图的左侧和上侧:
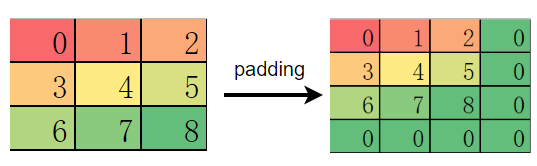
而 MindSpore 和 TensorFlow 则优先填充在特征图的右侧和下侧:
举例说明:
# mindspore example
import numpy as np
import mindspore as ms
from mindspore import Tensor, ops
ms.context.set_context(device_target="Ascend")
data = np.arange(9).reshape(1,1,3,3).astype(np.float32)
# data
# [[[[0. 1. 2.]
# [3. 4. 5.]
# [6. 7. 8.]]]]
op = ops.MaxPool(kernel_size=2, strides=2, pad_mode='same')
op(Tensor(data))
# [[[[4. 5.]
# [7. 8.]]]]
在做 MindSpore 模型迁移时,如果模型加载了 PyTorch 的预训练模型,而之后又在 MindSpore 进行 finetune,则该差异可能会导致精度下降,对于 padding 策略为 same 的卷积,开发者需要特别注意。
如果想和 PyTorch 行为保持一致,可以先使用 ops.Pad 算子手动 pad 元素,然后使用 pad_mode="valid" 的卷积和池化操作。
import numpy as np
import mindspore as ms
from mindspore import Tensor, ops
ms.context.set_context(device_target="Ascend")
data = np.arange(9).reshape(1, 1, 3, 3).astype(np.float32)
# only padding on top left of feature map
pad = ops.Pad(((0, 0), (0, 0), (1, 0), (1, 0)))
data = pad(Tensor(data))
ops.MaxPool(kernel_size=2, strides=2, pad_mode='same')(data)
# [[[[0. 2.]
# [6. 8.]]]]
默认权重初始化不同
我们知道权重初始化对网络的训练十分重要,通过我们会选择一个适合的分布来初始化权重。但还有一个部分算子会隐式的声明权重,在不同的框架中,即使这些算子功能一致,但如果隐式声明的权重初始化方式分布不同,也会对训练过程产生影响,甚至无法收敛。
常见隐式声明权重的算子:Conv、Dense(Linear)、Embedding、LSTM 等,其中区别较大的是 Conv 类和 Dense 两种算子。
Conv2d
mindspore.nn.Conv2d的weight为:\(\mathcal{N}(0, 1)\),bias为:zeros。
torch.nn.Conv2d的weight为:\(\mathcal{U} (-\sqrt{k},\sqrt{k} )\),bias为:\(\mathcal{U} (-\sqrt{k},\sqrt{k} )\)。
tf.keras.Layers.Conv2D的weight为:glorot_uniform,bias为:zeros。
其中,\(k=\frac{groups}{c_{in}*\prod_{i}^{}{kernel\_size[i]}}\)
Dense(Linear)
mindspore.nn.Linear的weight为:\(\mathcal{N}(0, 1)\),bias为:zeros。
torch.nn.Dense的weight为:\(\mathcal{U}(-\sqrt{k},\sqrt{k})\),bias为:\(\mathcal{U}(-\sqrt{k},\sqrt{k} )\)。
tf.keras.Layers.Dense的weight为:glorot_uniform,bias为:zeros。
其中,\(k=\frac{groups}{in\_features}\)
对于没有正则化的网络,如没有 BatchNorm 算子的 GAN 网络,梯度很容易爆炸或者消失,权重初始化就显得十分重要,各位开发者应注意权重初始化带来的影响。