网络迁移工具应用实践指南
![]()
概述
本指导介绍了将神经网络从其他机器学习框架迁移到MindSpore过程时,如何应用各种迁移相关工具以提高迁移效率,侧重描述如何将迁移工具与迁移过程紧密结合。
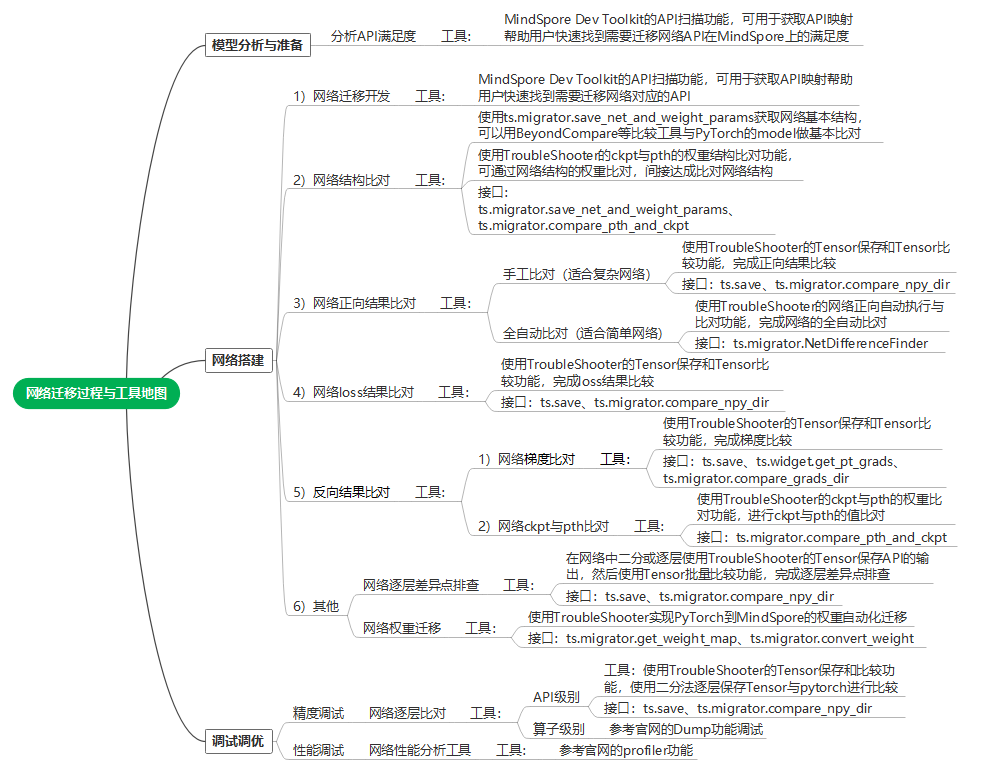
网络迁移路径相关工具说明
迁移路径工具地图
工具 |
工具说明 |
网络迁移用途 |
|---|---|---|
MindSpore Dev Toolkit是一款支持MindSpore开发的多平台Python IDE插件,提供创建项目、智能补全、API互搜和文档搜索等功能。 |
通过API扫描等能力,能够提升用户的网络迁移开发效率。 |
|
TroubleShooter 是MindSpore网络开发调试工具包,用于提供便捷、易用的调试能力。 |
网络调试工具集(如:网络权重迁移、精度比对、代码跟踪、报错分析、执行跟踪等功能),帮助用户提高迁移调试效率。 |
|
Profiler可将训练过程中的算子耗时等信息记录到文件中,通过可视化界面供用户查看分析,帮助用户更高效地调试神经网络性能。 |
网络迁移后,如果执行性能不佳,可用Profiler进行性能分析,Profiler提供框架的host执行、以及算子执行的Profiler分析功能。 |
|
提供了Dump功能,用来将模型训练中的图以及算子的输入输出数据保存到磁盘文件。 |
一般用于网络迁移复杂问题定位(例如:算子溢出等)可以dump出算子级别的数据。 |
网络迁移工具应用实例
本章节以一张网络(Vision Transformer)为例子完成网络迁移,并介绍关键迁移过程中各种工具的应用方法。
注:迁移网络的完整样例代码可参考如下链接
网络迁移开发
MindSpore Dev Toolkit的API扫描功能,扫描到PyTorch网络中的API与MindSpore API的映射关系,有差异的API可以打开“说明”的URL,会给出API详细分析,帮助用户快速构建MindSpore的网络代码。
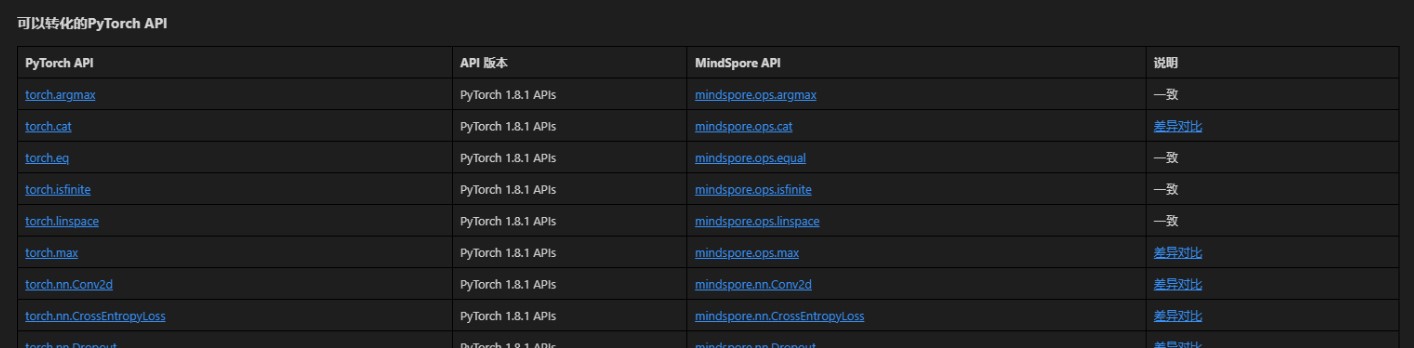
例如:torch.cat接口:
在“说明”的URL(PyTorch与MindSpore API映射表)中可见如下API差异。
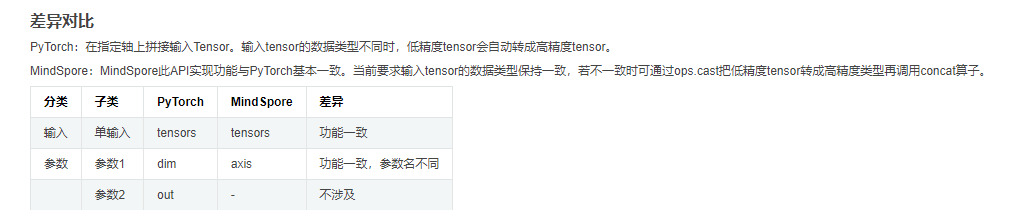
按照规则,可参考如下PyTorch代码:
x = torch.cat((cls_token, x), dim=1) # [B, 197, 768]
写出MindSpore代码:
x = mindspore.ops.cat((cls_token, x), axis=1) # [B, 197, 768]
网络结构初始验证
在网络初步迁移构建完成后,我们可以先进行一些网络结构的基础比对,以验证迁移的网络结构是否正确。可以分别使用如下两种方式进行网络结构的比对:
步骤1:获取PyTorch ViT网络结构和权重参数(pth)
调用ts.migrator.save_net_and_weight_params接口,可以将网络对象保存成文件(与用print打印model对象的内容相同,这里model是一个nn.Module对象),并且会保存权重参数到pth文件以及映射文件(用于与MindSpore进行权重比对)。
def net_pt_vit(args):
device = torch.device(args.device if torch.cuda.is_available() else "cpu")
model = create_model(num_classes=args.num_classes, has_logits=False).to(device)
ts.migrator.save_net_and_weight_params(model, path="/mindspore_model/vit/v1/temp_data/pt_net_info/")
在配置的path下,可以找到如下文件。
-rw-r--r-- 1 root root 8709 Jul 5 20:36 torch_net_architecture.txt (网络结构信息,与用python print打印model对象的内容相同)
-rw-r--r-- 1 root root 7737 Jul 5 20:36 torch_net_map.json (参数映射文件,用于与MindSpore进行权重比对)
-rw-r--r-- 1 root root 343261393 Jul 5 20:36 torch_troubleshooter_create.pth (权重参数)
步骤2:获取MindSpore ViT网络结构和权重参数(ckpt)
调用ts.migrator.save_net_and_weight_params接口,可以将网络对象保存成文件(与用print打印model对象的内容相同,这里model是一个Cell对象),并且会保存权重参数到ckpt文件。
def net_ms_vit(args):
model = create_model(num_classes=args.num_classes, has_logits=False)
ts.migrator.save_net_and_weight_params(model, path="/mindspore_model/vit/v1/temp_data/ms_net_info/")
在配置的path下,可以找到如下文件。
-r-------- 1 root root 343217199 Jul 5 20:26 mindspore_troubleshooter_create.ckpt (权重参数)
-rw-r--r-- 1 root root 14013 Jul 5 20:26 mindspore_net_architecture.txt (网络结构信息,与用python print打印model对象的内容相同)
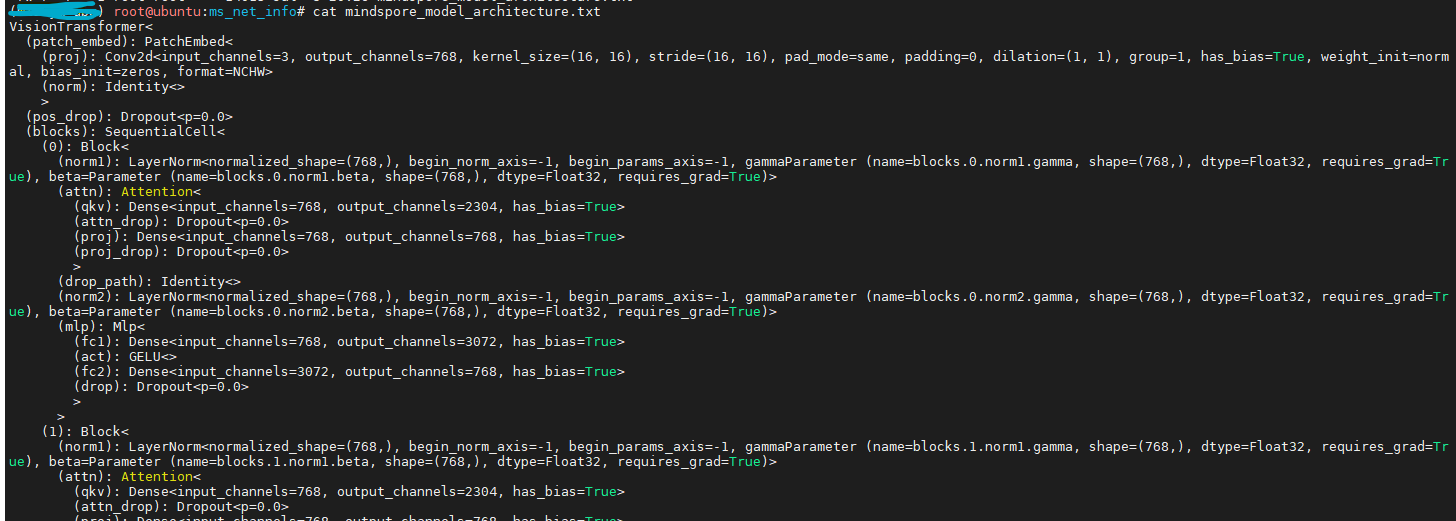
步骤3:通过net_architecture.txt比对网络基础结构
通过Beyond Compare等工具可以快速对比网络结构(即mindspore_net_architecture.txt与torch_net_architecture.txt),如下可初步判断网络结构层级基本是对齐的,存在一些天然的API以及参数差异,例如:Dense和Linear属于正常范围。

步骤4:再通过对比权重参数进一步比对网络结构
用我们步骤1和2保存的文件,通过TroubleShooter的ts.migrator.compare_pth_and_ckpt接口,可以完成pth与ckpt的权重参数结构比较,以进一步验证网络结构是否正确。
# weight_map_path 为步骤1导出的参数映射文件,compare_value=False代表只比对数量和shape信息,不比对参数值
ts.migrator.compare_pth_and_ckpt(
weight_map_path="/mindspore_model/vit/v1/temp_data/pt_net_info/torch_net_map.json",
pt_file_path="/mindspore_model/vit/v1/temp_data/pt_net_info/torch_troubleshooter_create.pth",
ms_file_path="/mindspore_model/vit/v1/temp_data/ms_net_info/mindspore_troubleshooter_create.ckpt",
compare_value=False)

网络正向结果验证
在迁移的MindSpore网络可以正常执行后,即可进行网络正向结果验证,验证是通过比对PyTorch和MindSpore网络正向结果来完成的。这里提供了两种不同的验证方案,一种是半自动验证方案,一种是全自动验证方案,我们将分别介绍两种方案适用场景和使用方法。
网络比对三个基本条件
说明:此处只做简单说明,详细步骤可参考半自动验证方案的例子
要进行PyTorch和MindSpore网络比对前,需要满足三个条件:
随机性固定并相同
可以在PyTorch和MindSpore使用ts.migrator.fix_random来固定随机性,例如:
ts.widget.fix_random(16)
输入数据样本一致
参考如下两步,可以用来保存和加载相同的数据样本(包含:数据和标签都可用此方法)。
步骤1:使用ts.save保存PyTorch网络的某个数据样本为npy,ts.save会自动编号为
0_images.npyts.save("/mindspore_model/vit/v1/temp_data/pt/npy/images.npy", images)
步骤2:再使用
np.load将这个数据分别加载成PyTorch的Tenosr和MindSpore的Tensorimages = torch.tensor(np.load('/mindspore_model/vit/v1/pytorch_org/vision_transformer/0_images.npy')) images = mindspore.Tensor(np.load('/mindspore_model/vit/v1/pytorch_org/vision_transformer/0_images.npy'))
初始化权重参数一致
一般我们会以PyTorch网络的权重为基准,转换为MindSpore的权重并加载,来实现统一的初始化权重参数,参考如下两步。
步骤1:保存PyTorch网络权重和转换映射,用于在MindSpore加载。
使用ts.migrator.save_net_and_weight_params接口,保存PyTorch网络权重和转换映射。 例如:
ts.migrator.save_net_and_weight_params(model, path="/mindspore_model/vit/v1/temp_data/pt_net_info/")
步骤2:在MindSpore网络转换并加载权重。
使用ts.migrator.convert_weight_and_load接口转换PyTorch权重,并加载到MindSpore的网络中。例如:
ts.migrator.convert_weight_and_load(weight_map_path="/mindspore_model/vit/v1/temp_data/pt_net_info/torch_net_map.json", pt_file_path="/mindspore_model/vit/v1/temp_data/pt_net_info/torch_troubleshooter_create.pth",net=model)
半自动验证方案
在满足比对的三个前提条件基础上,半自动验证方案通过手工指定要保存的数据,并进行批量比对完成正向结果的验证。半自动方案优点是场景适用性强,缺点是需要较多手工操作。
步骤1:执行PyTorch网络并获取正向结果
def run_pt_net(args):
# 1)固定随机性,调用ts.widget.fix_random接口固定PyTorch的随机性
ts.widget.fix_random(16)
device = torch.device(args.device if torch.cuda.is_available() else "cpu")
model = create_model(num_classes=args.num_classes, has_logits=False).to(device)
# 2)加载相同数据样本(样本可以用numpy.save在PyTorch网络执行时保持一个.npy格式的数据。)
images = torch.tensor(np.load('/mindspore_model/vit/v1/pytorch_org/vision_transformer/0_images.npy'))
# 3)保存权重和转换映射,用于在MindSpore加载
ts.migrator.save_net_and_weight_params(model, path="/mindspore_model/vit/v1/temp_data/pt_net_info/")
# 4)执行网络并保存正向结果,使用ts.save接口保存网络执行结果
pred = model(images.to(device))
ts.save("/mindspore_model/vit/v1/temp_data/pt/npy/pred.npy", pred)
步骤2:执行MindSpore网络获取正向结果
def run_ms_net(args):
# 1)固定随机性,与步骤1相同,调用相同接口 ts.widget.fix_random(16)
ts.widget.fix_random(16)
# 2)加载相同数据样本
images = mindspore.Tensor(np.load('/mindspore_model/vit/v1/pytorch_org/vision_transformer/0_images.npy'))
model = create_model(num_classes=args.num_classes, has_logits=False)
# 3)加载pt导出的权重,保证初始化权重参数一致
# 调用ts.migrator.convert_weight_and_load接口,将PyTorch权重参数转为MindSpore权重参数并加载到MindSpore网络中
ts.migrator.convert_weight_and_load(weight_map_path="/mindspore_model/vit/v1/temp_data/pt_net_info/torch_net_map.json",
pt_file_path="/mindspore_model/vit/v1/temp_data/pt_net_info/torch_troubleshooter_create.pth",
net=model)
# 4)执行网络并保存正向结果
pred = model(images)
ts.save("/mindspore_model/vit/v1/temp_data/ms/npy/pred.npy", pred)
步骤3:进行比较并查看比对结果
使用ts.migrator.compare_npy_dir接口,进行正向结果比较。
# 5)比较PyTorch与MindSpore的正向输出结果,调用ts.migrator.compare_npy_dir接口完成保存的正向结果比较
ts.migrator.compare_npy_dir('/mindspore_model/vit/v1/temp_data/pt/npy',
'/mindspore_model/vit/v1/temp_data/ms/npy')
可见如下比对结果,正向网络结果通过allclose和余弦相似度比较,都可以正常对齐,证明结果完全相同。
The orig dir: /mnt/sdb2/mindspore_model/vit/v1/temp_data/pt/npy
The target dir: /mnt/sdb2/mindspore_model/vit/v1/temp_data/ms/npy

全自动验证方案
全自动验证方案适用于验证推理网络或网络正向结果等迁移场景,与半自动方案的差别在于由工具自动完成各种对比前的条件对齐,用户只需要传入网络对象即可,相对于半自动方案更为简单,基本可实现一键式比对,但一些复杂场景使用可能受限,例如:PyTorch网络和MindSpore网络不方便跑在同一机器上。全自动验证方案不能支持的场景,请参考半自动验证方案章节。
步骤1:导入PyTorch模型对象,完成网络正向自动比对
def auto_run_ms_net(args):
# 1)导入pytoch脚本路径,并import pytorch的model,用于创建PyTorch模型对象
import sys
sys.path.insert(0, "/mindspore_model/vit/v1/pytorch_org")
from pytorch_org.vision_transformer.vit_model import vit_base_patch16_224_in21k as create_pt_model
# 2)分别创建MindSpore的model对象和PyTorch的model对象,用于传入自动比对接口
model = create_model(num_classes=args.num_classes, has_logits=False)
pt_model = create_pt_model(num_classes=args.num_classes, has_logits=False)
# 3)创建正向自动比对对象,并执行比对
diff_finder = ts.migrator.NetDifferenceFinder(pt_net=pt_model,
ms_net=model)
# auto_inputs参数,可自动按照shape生成数据样本,compare将自动对齐权重、固定随机性。
diff_finder.compare(auto_inputs=(((8, 3, 224,224), np.float32),))
步骤2:查看比对结果
接口运行后会打印一些执行过程的日志,最后会打印网络正向输出的比对结果。

说明:当结果不一致的时候,可通过ts.save接口,二分或逐层导出网络各层API的输出,并通过ts.migrator.compare_npy_dir接口批量比对,来定位到问题引入的API。
网络loss结果验证
loss的验证方案,与正向结果的半自动验证方案类似,在满足比对的三个前提条件基础上,通过手工指定要保存的loss并使用ts.save接口进行保存,并使用ts.migrator.compare_npy_dir进行批量比对完成loss的结果验证,具体步骤参考正向结果的半自动验证方案即可。
反向结果验证(含梯度、权重参数的比对)
梯度的比对验证方案,思路也与正向结果的半自动验证方案类似,但调用方式略有不同,参考如下步骤操作。
步骤1:保存PyTorch网络训练各阶段的输出
与正向结果的半自动验证方案类似,我们可以用ts.save接口进行训练各阶段关键数据的保存,例如:正向输出、loss、grads、权重参数等。参考下方例子,会对每个关键数据保存进行说明。
def train_one_step(args):
# 1)固定随机性
ts.widget.fix_random(16)
# 2)训练网络的创建流程
device = torch.device(args.device if torch.cuda.is_available() else "cpu")
model = create_model(num_classes=args.num_classes, has_logits=False).to(device)
loss_function = torch.nn.CrossEntropyLoss()
pg = [p for p in model.parameters() if p.requires_grad]
optimizer = optim.SGD(pg, lr=args.lr, momentum=0.9, weight_decay=5E-5)
model.train()
optimizer.zero_grad()
# 3)统一数据样本和标签
images = torch.tensor(np.load('/mindspore_model/vit/v1/'
'pytorch_org/vision_transformer/1_None.npy'))
labels = torch.tensor(np.load('/mindspore_model/vit/v1/'
'pytorch_org/vision_transformer/0_None.npy'))
# 4)保存权重和转换映射,用于在MindSpore加载
ts.migrator.save_net_and_weight_params(model, path="/mindspore_model/vit/v1/temp_data/pt_net_info/")
# 5)执行训练过程
pred = model(images.to(device))
loss = loss_function(pred, labels.to(device))
loss.backward()
# 6)保存梯度
# ts.widget.get_pt_grads 接口封装了PyTorch保存grads的方法,可直接调用此接口并使用ts.save保存
# 因为梯度是一个Tensor list所以ts.save保存梯度会保存多个文件并自动编号,建议单独建立目录保存梯度列表
ts.save("/mindspore_model/vit/v1/temp_data/pt/grads/grads.npy", ts.widget.get_pt_grads(model))
optimizer.step()
# 7) 保存权重参数pth,设置weight_params_filename名称,不使用默认值避免覆盖初始化的权重
ts.migrator.save_net_and_weight_params(model, path="/mindspore_model/vit/v1/temp_data/pt_net_info/",
weight_params_filename='result_pt.pth')
步骤2:保存MindSpore网络训练各阶段的输出
def train_one_step_ms(args):
# 1)固定随机性
ts.widget.fix_random(16)
# 2)训练网络的创建流程
model = create_model(num_classes=args.num_classes, has_logits=False)
optimizer = mindspore.nn.SGD(model.trainable_params(), learning_rate=args.lr, momentum=0.9, weight_decay=5E-5)
loss_function = mindspore.nn.CrossEntropyLoss()
def forward_fn(data, label):
logits = model(data)
loss = loss_function(logits, label)
return loss, logits
grad_fn = mindspore.value_and_grad(forward_fn, None, optimizer.parameters, has_aux=True)
# 3)加载pt导出的权重,保证初始化权重参数一致
# 调用ts.migrator.convert_weight_and_load接口,将PyTorch权重参数转为MindSpore权重参数并加载到MindSpore网络中
ts.migrator.convert_weight_and_load(weight_map_path="/mindspore_model/vit/v1/temp_data/pt_net_info/torch_net_map.json",
pt_file_path="/mindspore_model/vit/v1/temp_data/pt_net_info/torch_troubleshooter_create.pth",
net=model)
# 4)加载与PT相同的数据样本和标签
data = mindspore.Tensor(np.load('/mindspore_model/vit/v1/pytorch_org/vision_transformer/1_None.npy'))
label = mindspore.Tensor(np.load('/mindspore_model/vit/v1/pytorch_org/vision_transformer/0_None.npy'))
# 5)执行训练过程
(loss, pred), grads = grad_fn(data, label.astype(mstype.int32))
# 6)保存梯度
ts.save("/mindspore_model/vit/v1/temp_data/ms/grads/grads.npy", grads)
optimizer(grads)
# 7)保存权重参数pth
mindspore.save_checkpoint(model,"/mindspore_model/vit/v1/temp_data/ms/ms_result.ckpt")
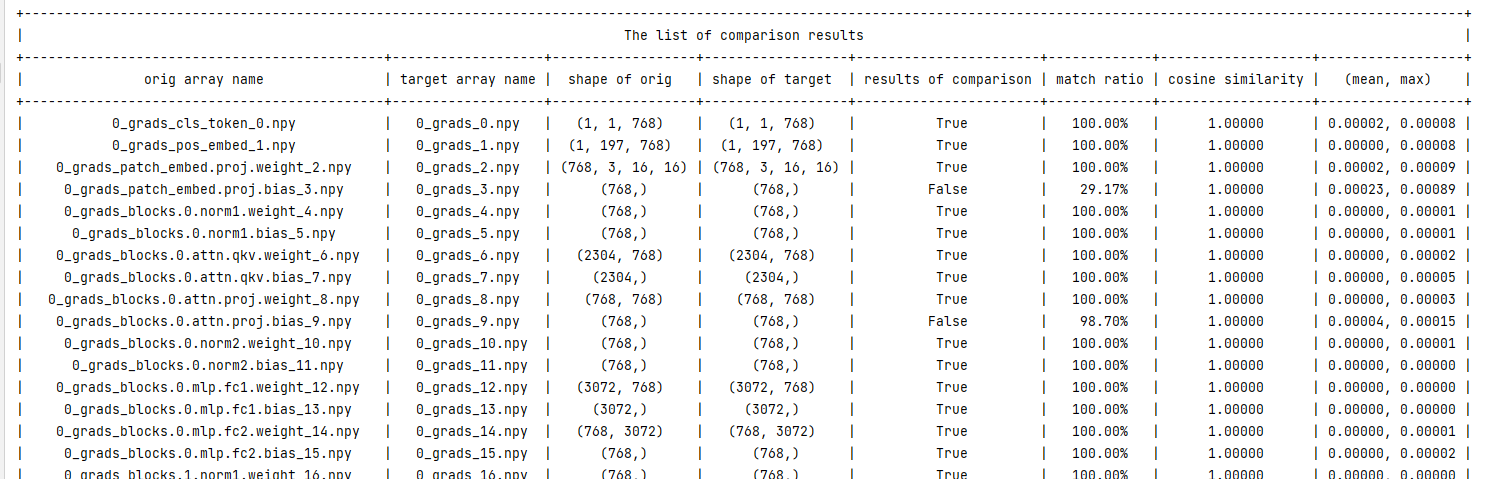
步骤3:比较梯度
使用ts.migrator.compare_grads_dir接口,进行梯度比较。
ts.migrator.compare_grads_dir('/mindspore_model/vit/v1/temp_data/pt/grads',
'/mindspore_model/vit/v1/temp_data/ms/grads')
The orig dir: /mindspore_model/vit/v1/temp_data/pt/grads
The target dir: /mindspore_model/vit/v1/temp_data/ms/grads
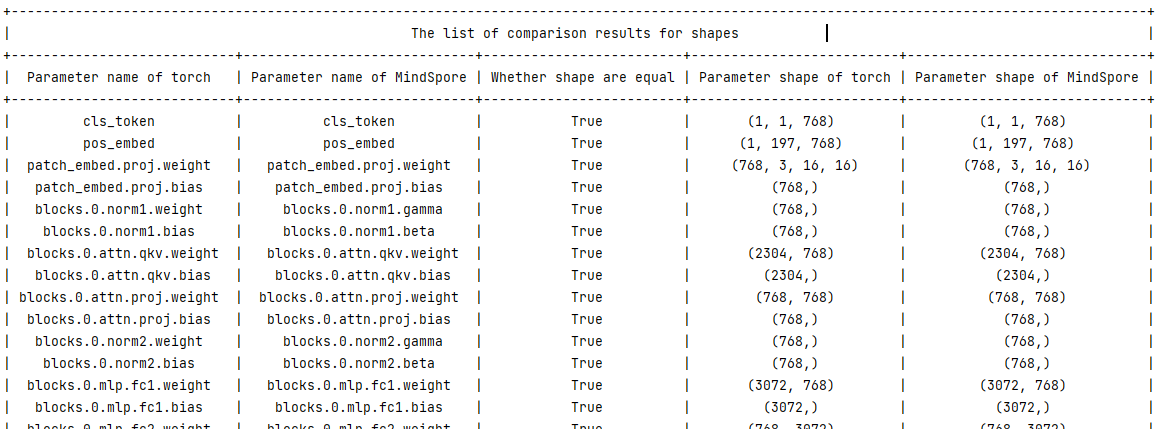
步骤4:比较权重参数
使用ts.migrator.compare_pth_and_ckpt接口,进行权重参数比对。
ts.migrator.compare_pth_and_ckpt(weight_map_path="/mindspore_model/vit/v1/temp_data/pt_net_info/torch_net_map.json",
pt_file_path="/mindspore_model/vit/v1/temp_data/pt_net_info/result_pt.pth",
ms_file_path="/mindspore_model/vit/v1/temp_data/ms/ms_result.ckpt")
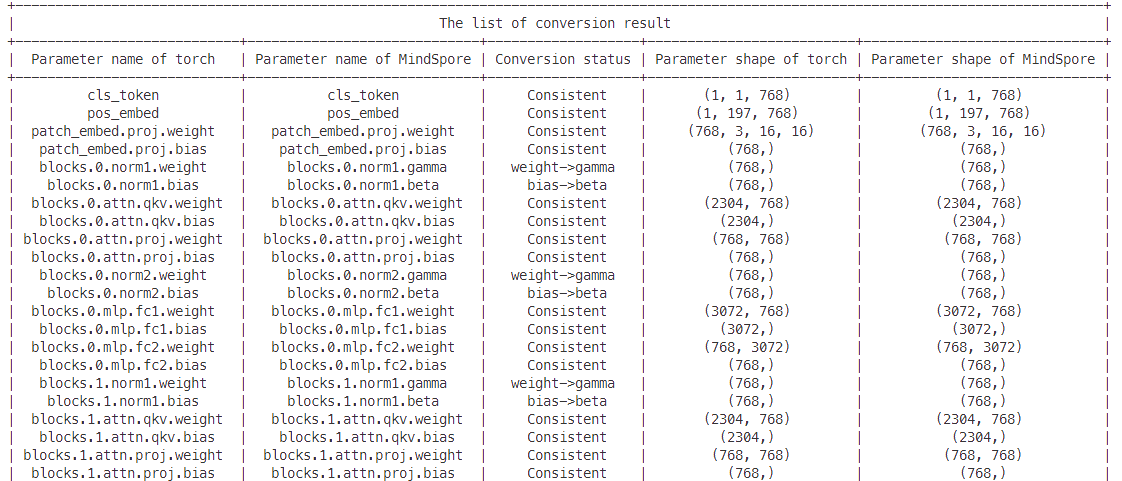
获取到权重参数shape的比较结果。
获取到权重参数数值的比较结果。
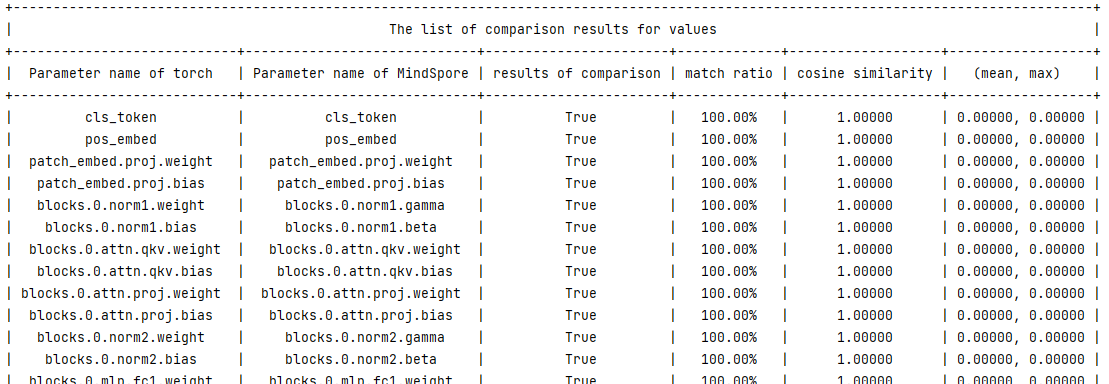
说明:如果比对结果不一致,可以往前回溯到梯度是否一致,如果梯度一致,则可以检查优化器使用是否正确,可参考网络逐层差异点排查章节,逐层进行问题定界排查。
其他
网络逐层差异点排查
在比较网络正向结果或者loss不一致时,我们需要定位问题原因,则可采取二分或者逐层保存API输出并进行数据比对的方式来排查差异引入点。此比对也需要满足比对的三个基本条件。
步骤1:保存PyTorch的网络部分API输出
在网络中,使用ts.save保存API的输出,用于排查网络差异引入点。
说明:ts.save支持保存Tensor(包括mindspore.Tensor和torch.tensor),以及Tensor构成的list/tuple/dict。当为list/tuple类型时,会按照顺序添加编号;当为dict类型时,文件名中会添加key,详细参考troubleshooter.save。
class Mlp(nn.Module):
"""
MLP as used in Vision Transformer, MLP-Mixer and related networks
"""
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
# 保存self.fc1 即nn.Linear的输出
ts.save('/mindspore_model/vit/v1/temp_data/pt/npy/fc1.npy', x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
# 保存self.fc2 即nn.Linear的输出
ts.save('/mindspore_model/vit/v1/temp_data/pt/npy/fc2.npy', x)
x = self.drop(x)
return x
步骤2:保存MindSpore的网络部分API输出
在网络中,使用ts.save保存API的输出,用于排查网络差异引入点。
class Mlp(nn.Cell):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Dense(in_features, hidden_features)
#self.act = act_layer(approximate=False)
self.act = nn.GELU(approximate=False)
self.fc2 = nn.Dense(hidden_features, out_features)
self.drop = nn.Dropout(p=drop)
def construct(self, x):
x = self.fc1(x)
# 保存self.fc1 即nn.Dense的输出
ts.save('/mindspore_model/vit/v1/temp_data/ms/npy/fc1.npy', x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
# 保存self.fc2 即nn.Dense的输出
ts.save('/mindspore_model/vit/v1/temp_data/ms/npy/fc2.npy', x)
x = self.drop(x)
return x
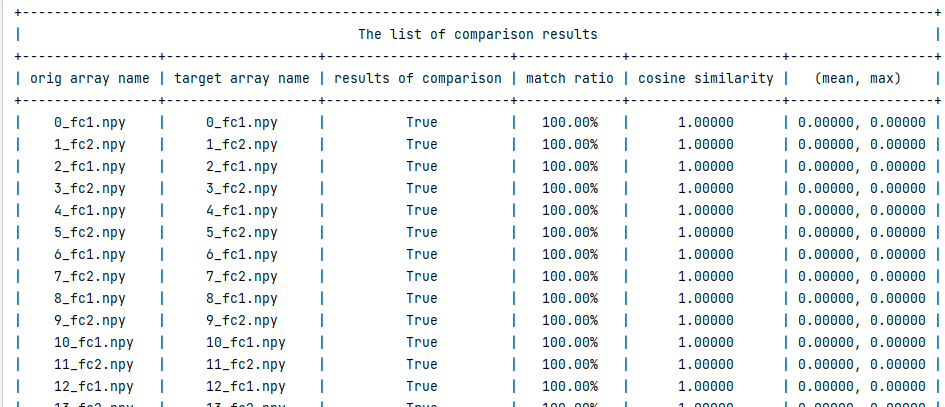
步骤3:比对API输出结果,查找差异点
使用ts.migrator.compare_npy_dir接口对各层保存的数据进行比对,可以通过比对结果判定哪里引入了差异,以进行问题定位。
ts.migrator.compare_npy_dir('/mindspore_model/vit/v1/temp_data/pt/npy',
'/mindspore_model/vit/v1/temp_data/ms/npy')
网络权重迁移
在迁移推理网络或微调网络训练等场景中,通常需要将PyTorch的权重迁移到MindSpore中。此时可以使用TroubleShooter的权重迁移工具,先调用ts.migrator.get_weight_map获取权重映射的json文件,再调用ts.migrator.convert_weight完成权重自动化迁移,以下为基本样例。需要添加前缀、自定义映射等复杂场景可参考TroubleShooter pth到ckpt权重自动转换。
import troubleshooter as ts
device = torch.device(args.device if torch.cuda.is_available() else "cpu")
# 1)创建Torch网络
model = create_model(num_classes=args.num_classes, has_logits=False).to(device)
# 2)通过Torch网络,获取权重映射json文件
ts.migrator.get_weight_map(model, weight_map_save_path="/mindspore_model/vit/v1/temp_data/pt_net_info/torch_net_map.json")
# 3)使用2)得到的权重映射json文件,进行权重转换
ts.migrator.convert_weight(weight_map_path="/mindspore_model/vit/v1/temp_data/pt_net_info/torch_net_map.json",
pt_file_path="/torch_model/vit/v1/torch_net.pth",
ms_file_save_path='/mindspore_model/vit/v1/ms_net.ckpt')
执行convert_weight时会打印权重转换过程中的详细信息,包括名称、转换详情、参数的shape等信息,如下图所示。