Migration Script
Translator: zhangxiaoxiao
![]()
Overview
This document describes how to migrate network scripts from the TensorFlow or PyTorch framework to MindSpore。
Migrating the TensorFlow Script to MindSpore
Migrate scripts by reading the TensorBoard graphs。
The PoseNet implemented by TensorFlow is used as an example to show how to use TensorBoard to read graphs, write mindspore code, and migrate TensorFlow Models to MindSpore.
The PoseNet code mentioned here is based on Python2. You need to make some syntax changes to run on Python3. Details are not described here.
Rewrite the code, use
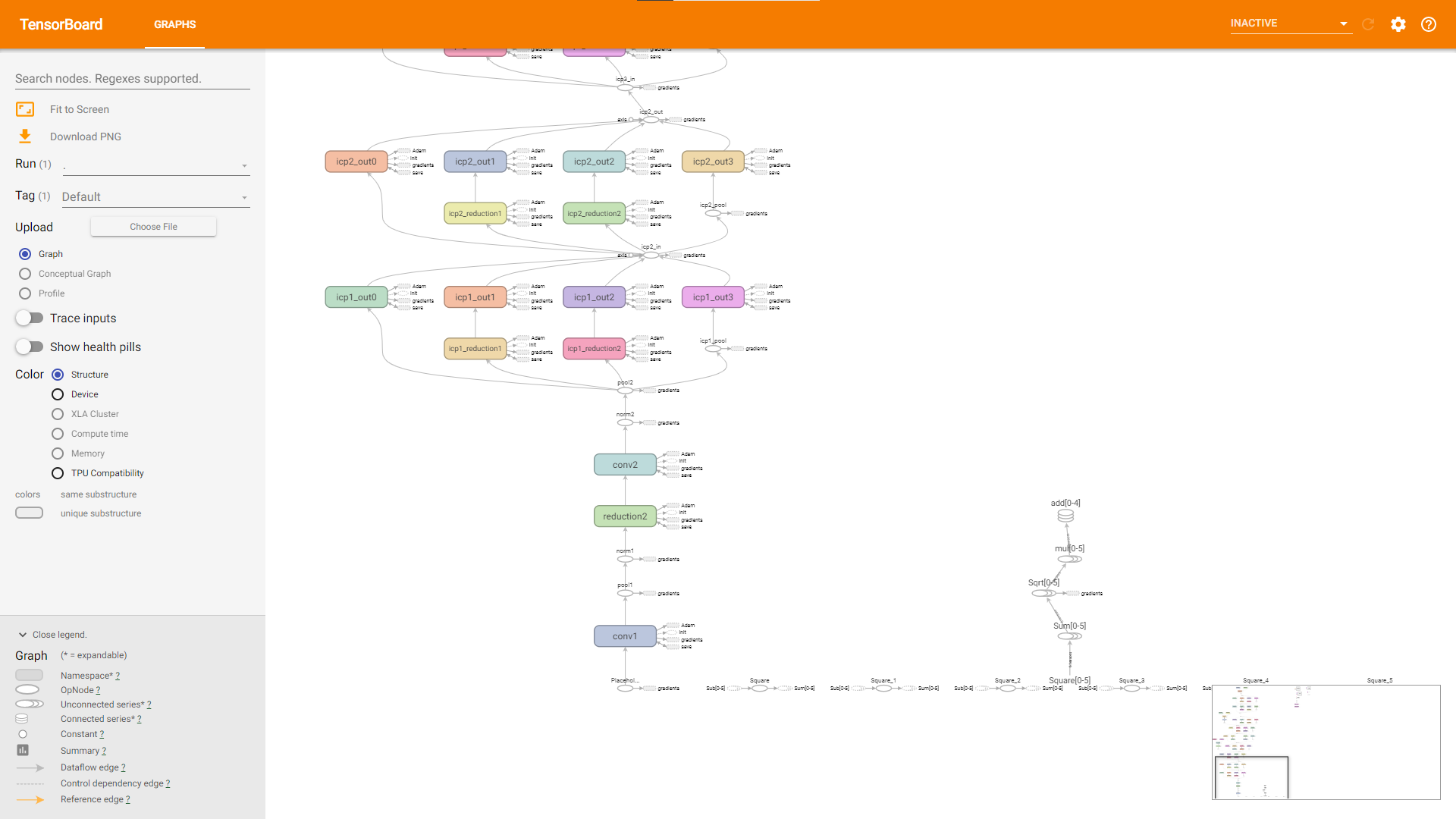
tf.summaryinterface to save the log required by TensorBoard, start TensorBoard.The following figure shows the opened TensorBoard, it’s for reference only. The figure displayed on TensorBoard may vary in the log generation mode.
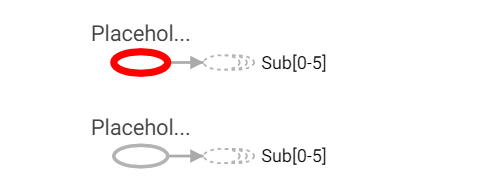
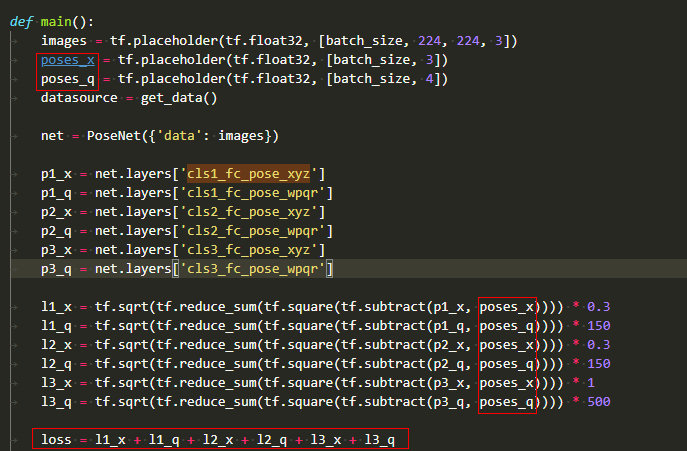
Find the placeholder of three inputs, view the figure and read the code, the second and third inputs are used only for loss calculation.
So far, we can preliminarily follow three steps to construct a network model:
Step 1, the first three inputs of the network will compute six outputs in the backbone.
Step 2, the result of step 1, the second and third inputs are used to calculate the loss in the loss subnet.
Step 3, construct the reverse network by using
TrainOneStepCellautomatic differentiation. Use the Adam optimizer and attributes provided by TensorFlow to write the corresponding Mindspore optimizer to update parameters. The network backbone can write as follows:import mindspore from mindspore import nn from mindspore.nn import TrainOneStepCell from mindspore.nn import Adam # combine backbone and loss class PoseNetLossCell(nn.Cell): def __init__(self, backbone, loss): super(PoseNetLossCell, self).__init__() self.pose_net = backbone self.loss = loss def construct(self, input_1, input_2, input_3): p1_x, p1_q, p2_x, p2_q, p3_x, p3_q = self.poss_net(input_1) loss = self.loss(p1_x, p1_q, p2_x, p2_q, p3_x, p3_q, input_2, input_3) return loss # define backbone class PoseNet(nn.Cell): def __init__(self): super(PoseNet, self).__init__() def construct(self, input_1): """do something with input_1, output num 6""" return p1_x, p1_q, p2_x, p2_q, p3_x, p3_q # define loss class PoseNetLoss(nn.Cell): def __init__(self): super(PoseNetLoss, self).__init__() def construct(self, p1_x, p1_q, p2_x, p2_q, p3_x, p3_q, poses_x, poses_q): """do something to calc loss""" return loss # define network backbone = PoseNet() loss = PoseNetLoss() net_with_loss = PoseNetLossCell(backbone, loss) opt = Adam(net_with_loss.trainable_params(), learning_rate=0.001, beta1=0.9, beta2=0.999, eps=1e-08, use_locking=False) net_with_grad = TrainOneStepCell(net_with_loss, opt)
Next, let’s implement the computing logic in the backbone.
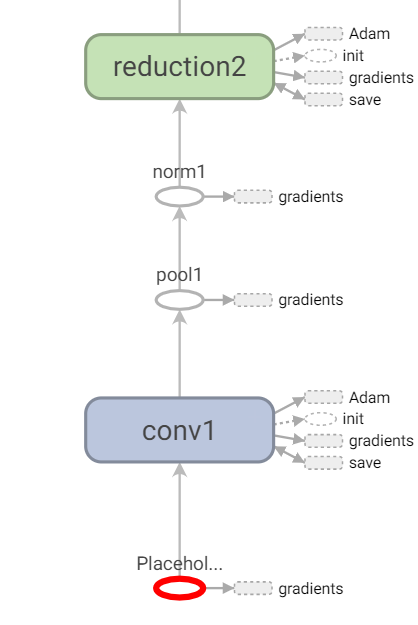
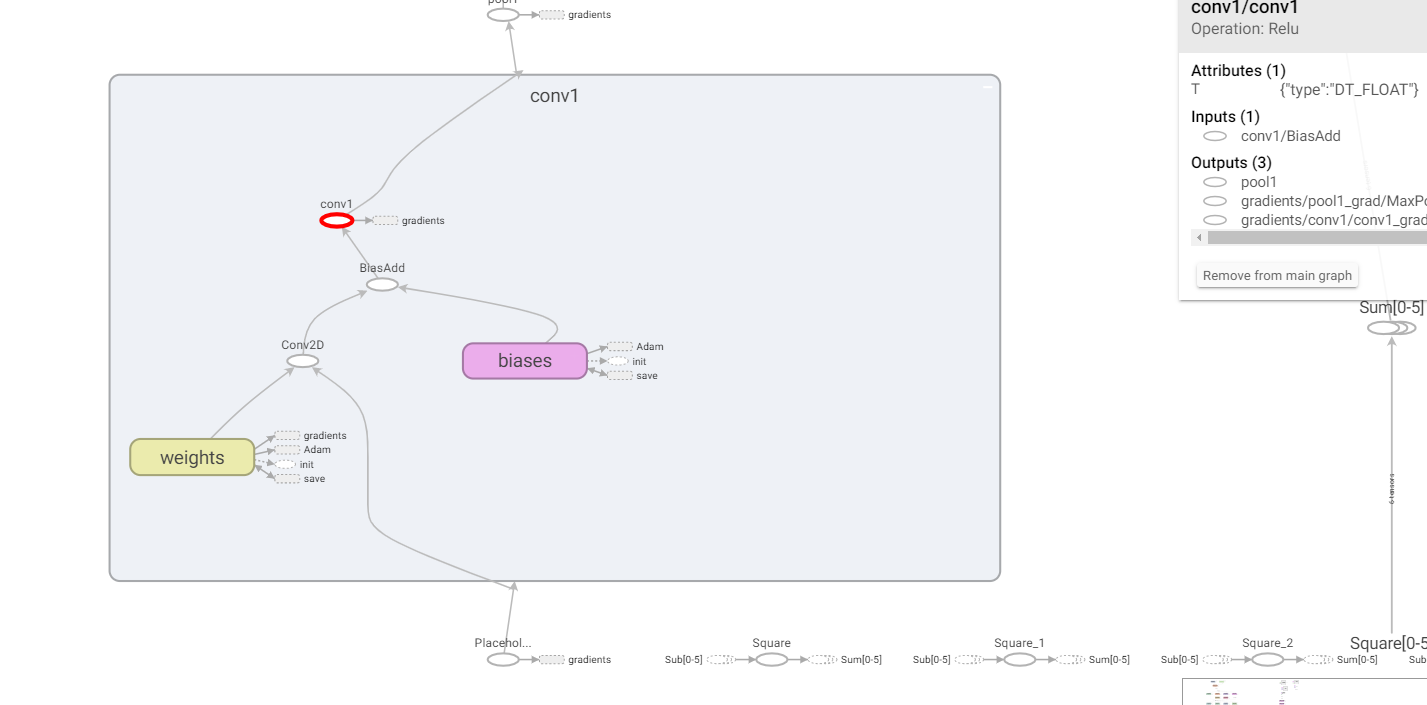
The first input passes through a subgraph named conv1, the computing logic can be obtained by looking at the following figure:
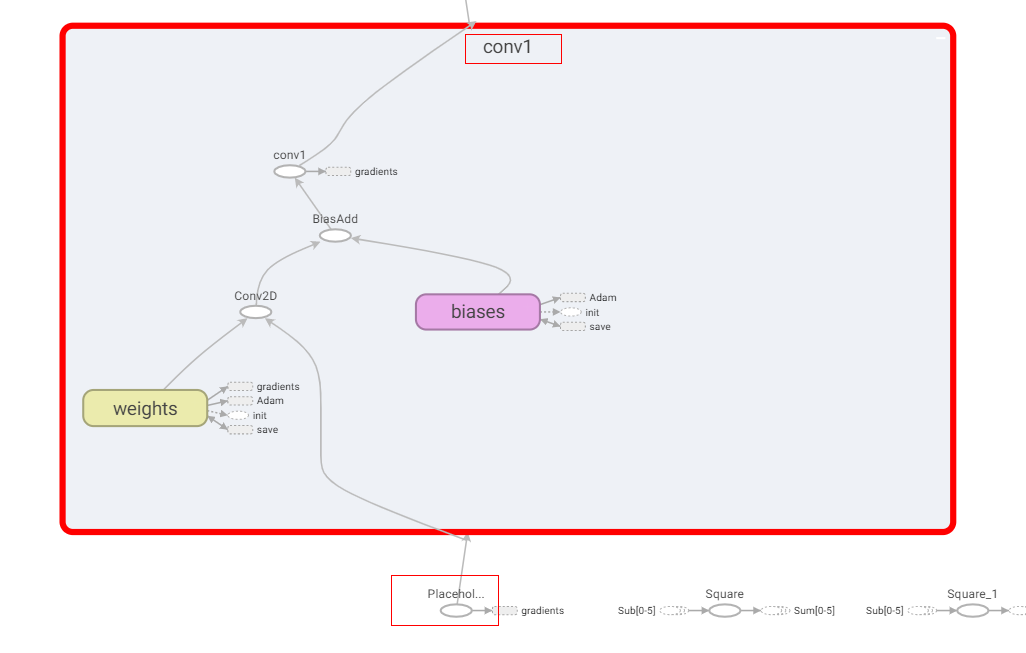
input->Conv2D->BiasAdd->ReLU, although the operator name after BiasAdd is conv1, it actually executes ReLU.
Then, the first subgraph conv1 can be defined as follows. Specific parameters are aligned with those in the original project:
class Conv1(nn.Cell): def __init__(self): super(Conv1, self).__init__() self.conv = Conv2d() self.relu = ReLU() def construct(self, x): x = self.conv(x) x = self.relu(x) return x
By observing the TensorBoard figure and code, we find that the subnet of the conv type defined in the original TensorFlow project can be copied as the subnet of MindSpore to reduce repeated code.
TensorFlow project conv subnet definition:
def conv(self, input, k_h, k_w, c_o, s_h, s_w, name, relu=True, padding=DEFAULT_PADDING, group=1, biased=True): # Verify that the padding is acceptable self.validate_padding(padding) # Get the number of channels in the input c_i = input.get_shape()[-1] # Verify that the grouping parameter is valid assert c_i % group == 0 assert c_o % group == 0 # Convolution for a given input and kernel convolve = lambda i, k: tf.nn.conv2d(i, k, [1, s_h, s_w, 1], padding=padding) with tf.variable_scope(name) as scope: kernel = self.make_var('weights', shape=[k_h, k_w, c_i / group, c_o]) if group == 1: # This is the common-case. Convolve the input without any further complications. output = convolve(input, kernel) else: # Split the input into groups and then convolve each of them independently input_groups = tf.split(3, group, input) kernel_groups = tf.split(3, group, kernel) output_groups = [convolve(i, k) for i, k in zip(input_groups, kernel_groups)] # Concatenate the groups output = tf.concat(3, output_groups) # Add the biases if biased: biases = self.make_var('biases', [c_o]) output = tf.nn.bias_add(output, biases) if relu: # ReLU non-linearity output = tf.nn.relu(output, name=scope.name) return output
The Mindspore subnet is defined as follows:
from mindspore import nn from mindspore.nn import Conv2d, ReLU class ConvReLU(nn.Cell): def __init__(self, channel_in, kernel_size, channel_out, strides): super(ConvReLU, self).__init__() self.conv = Conv2d(channel_in, channel_out, kernel_size, strides, has_bias=True) self.relu = ReLU() def construct(self, x): x = self.conv(x) x = self.relu(x) return x
Based on the data flow direction and operator attributes in the TensorBoard, the backbone computing logic can be written as follows:
from mindspore.nn import MaxPool2d import mindspore.ops as ops class LRN(nn.Cell): def __init__(self, radius, alpha, beta, bias=1.0): super(LRN, self).__init__() self.lrn = ops.LRN(radius, bias, alpha, beta) def construct(self, x): return self.lrn(x) class PoseNet(nn.Cell): def __init__(self): super(PoseNet, self).__init__() self.conv1 = ConvReLU(3, 7, 64, 2) self.pool1 = MaxPool2d(3, 2, pad_mode="SAME") self.norm1 = LRN(2, 2e-05, 0.75) self.reduction2 = ConvReLU(64, 1, 64, 1) self.conv2 = ConvReLU(64, 3, 192, 1) self.norm2 = LRN(2, 2e-05, 0.75) self.pool2 = MaxPool2d(3, 2, pad_mode="SAME") self.icp1_reduction1 = ConvReLU(192, 1, 96, 1) self.icp1_out1 = ConvReLU(96, 3, 128, 1) self.icp1_reduction2 = ConvReLU(192, 1, 16, 1) self.icp1_out2 = ConvReLU(16, 5, 32, 1) self.icp1_pool = MaxPool2d(3, 1, pad_mode="SAME") self.icp1_out3 = ConvReLU(192, 5, 32, 1) self.icp1_out0 = ConvReLU(192, 1, 64, 1) self.concat = ops.Concat(axis=1) self.icp2_reduction1 = ConvReLU(256, 1, 128, 1) self.icp2_out1 = ConvReLU(128, 3, 192, 1) self.icp2_reduction2 = ConvReLU(256, 1, 32, 1) self.icp2_out2 = ConvReLU(32, 5, 96, 1) self.icp2_pool = MaxPool2d(3, 1, pad_mode="SAME") self.icp2_out3 = ConvReLU(256, 1, 64, 1) self.icp2_out0 = ConvReLU(256, 1, 128, 1) self.icp3_in = MaxPool2d(3, 2, pad_mode="SAME") self.icp3_reduction1 = ConvReLU(480, 1, 96, 1) self.icp3_out1 = ConvReLU(96, 3, 208, 1) self.icp3_reduction2 = ConvReLU(480, 1, 16, 1) self.icp3_out2 = ConvReLU(16, 5, 48, 1) self.icp3_pool = MaxPool2d(3, 1, pad_mode="SAME") self.icp3_out3 = ConvReLU(480, 1, 64, 1) self.icp3_out0 = ConvReLU(480, 1, 192, 1) """etc""" """...""" def construct(self, input_1): """do something with input_1, output num 6""" x = self.conv1(input_1) x = self.pool1(x) x = self.norm1(x) x = self.reduction2(x) x = self.conv2(x) x = self.norm2(x) x = self.pool2(x) pool2 = x x = self.icp1_reduction1(x) x = self.icp1_out1(x) icp1_out1 = x icp1_reduction2 = self.icp1_reduction2(pool2) icp1_out2 = self.icp1_out2(icp1_reduction2) icp1_pool = self.icp1_pool(pool2) icp1_out3 = self.icp1_out3(icp1_pool) icp1_out0 = self.icp1_out0(pool2) icp2_in = self.concat((icp1_out0, icp1_out1, icp1_out2, icp1_out3)) """etc""" """...""" return p1_x, p1_q, p2_x, p2_q, p3_x, p3_q
Correspondingly, the loss computing logic may be written as follows:
class PoseNetLoss(nn.Cell): def __init__(self): super(PoseNetLoss, self).__init__() self.sub = ops.Sub() self.square = ops.Square() self.reduce_sum = ops.ReduceSum() self.sqrt = ops.Sqrt() def construct(self, p1_x, p1_q, p2_x, p2_q, p3_x, p3_q, poses_x, poses_q): """do something to calc loss""" l1_x = self.sqrt(self.reduce_sum(self.square(self.sub(p1_x, poses_x)))) * 0.3 l1_q = self.sqrt(self.reduce_sum(self.square(self.sub(p1_q, poses_q)))) * 150 l2_x = self.sqrt(self.reduce_sum(self.square(self.sub(p2_x, poses_x)))) * 0.3 l2_q = self.sqrt(self.reduce_sum(self.square(self.sub(p2_q, poses_q)))) * 150 l3_x = self.sqrt(self.reduce_sum(self.square(self.sub(p3_x, poses_x)))) * 1 l3_q = self.sqrt(self.reduce_sum(self.square(self.sub(p3_q, poses_q)))) * 500 return l1_x + l1_q + l2_x + l2_q + l3_x + l3_q
Ultimately, your training script should look like this:
if __name__ == "__main__": backbone = PoseNet() loss = PoseNetLoss() net_with_loss = PoseNetLossCell(backbone, loss) opt = Adam(net_with_loss.trainable_params(), learning_rate=0.001, beta1=0.9, beta2=0.999, eps=1e-08, use_locking=False) net_with_grad = TrainOneStepCell(net_with_loss, opt) """dataset define""" model = Model(net_with_grad) model.train(epoch_size, dataset)
In this way, the model script is basically migrated from TensorFlow to Mindspore. Then, various Mindspore tools and computing policies are used to optimize the precision.
Migrating the PyTorch Script to MindSpore
Read the PyTorch script to migrate directly.
The PyTorch subnet module usually inherits
torch.nn.Module, and MindSpore usually inheritsmindspore.nn.Cell. The forward method needs to be re-written for the forward calculation logic of the PyTorch subnet module, and the construct method needs to be rewritten for the forward calculation logic of the MindSpore subnet module.Take the migration of the Bottleneck class in MindSpore as an example.
PyTorch project code
# defined in PyTorch class Bottleneck(nn.Module): def __init__(self, inplanes, planes, stride=1, mode='NORM', k=1, dilation=1): super(Bottleneck, self).__init__() self.mode = mode self.relu = nn.ReLU(inplace=True) self.k = k btnk_ch = planes // 4 self.bn1 = nn.BatchNorm2d(inplanes) self.conv1 = nn.Conv2d(inplanes, btnk_ch, kernel_size=1, bias=False) self.bn2 = nn.BatchNorm2d(btnk_ch) self.conv2 = nn.Conv2d(btnk_ch, btnk_ch, kernel_size=3, stride=stride, padding=dilation, dilation=dilation, bias=False) self.bn3 = nn.BatchNorm2d(btnk_ch) self.conv3 = nn.Conv2d(btnk_ch, planes, kernel_size=1, bias=False) if mode == 'UP': self.shortcut = None elif inplanes != planes or stride > 1: self.shortcut = nn.Sequential( nn.BatchNorm2d(inplanes), self.relu, nn.Conv2d(inplanes, planes, kernel_size=1, stride=stride, bias=False) ) else: self.shortcut = None def _pre_act_forward(self, x): residual = x out = self.bn1(x) out = self.relu(out) out = self.conv1(out) out = self.bn2(out) out = self.relu(out) out = self.conv2(out) out = self.bn3(out) out = self.relu(out) out = self.conv3(out) if self.mode == 'UP': residual = self.squeeze_idt(x) elif self.shortcut is not None: residual = self.shortcut(residual) out += residual return out def squeeze_idt(self, idt): n, c, h, w = idt.size() return idt.view(n, c // self.k, self.k, h, w).sum(2) def forward(self, x): out = self._pre_act_forward(x) return out
Based on the differences in defining convolution parameters between PyTorch and MindSpore, the definition can be translated as follows:
from mindspore import nn import mindspore.ops as ops # defined in MindSpore class Bottleneck(nn.Cell): def __init__(self, inplanes, planes, stride=1, k=1, dilation=1): super(Bottleneck, self).__init__() self.mode = mode self.relu = nn.ReLU() self.k = k btnk_ch = planes // 4 self.bn1 = nn.BatchNorm2d(num_features=inplanes, momentum=0.9) self.conv1 = nn.Conv2d(in_channels=inplanes, out_channels=btnk_ch, kernel_size=1, pad_mode='pad', has_bias=False) self.bn2 = nn.BatchNorm2d(num_features=btnk_ch, momentum=0.9) self.conv2 = nn.Conv2d(in_channels=btnk_ch, out_channels=btnk_ch, kernel_size=3, stride=stride, pad_mode='pad', padding=dilation, dilation=dilation, has_bias=False) self.bn3 = nn.BatchNorm2d(num_features=btnk_ch, momentum=0.9) self.conv3 = nn.Conv2d(in_channels=btnk_ch, out_channels=planes, kernel_size=1, pad_mode='pad', has_bias=False) self.shape = ops.Shape() self.reshape = ops.Reshape() self.reduce_sum = ops.ReduceSum() if mode == 'UP': self.shortcut = None elif inplanes != planes or stride > 1: self.shortcut = nn.SequentialCell([ nn.BatchNorm2d(num_features=inplanes, momentum=0.9), nn.ReLU(), nn.Conv2d(in_channels=inplanes, out_channels=planes, kernel_size=1, stride=stride, pad_mode='pad', has_bias=False) ]) else: self.shortcut = None def _pre_act_forward(self, x): residual = x out = self.bn1(x) out = self.relu(out) out = self.conv1(out) out = self.bn2(out) out = self.relu(out) out = self.conv2(out) out = self.bn3(out) out = self.relu(out) out = self.conv3(out) if self.shortcut is not None: residual = self.shortcut(residual) out += residual return out def construct(self, x): out = self._pre_act_forward(x) return out
PyTorch backpropagation is usually implemented by
loss.backward(), and parameter update is implemented byoptimizer.step(), In MindSpore, these parameters do not need to be explicitly invoked by the user and can be transferred to theTrainOneStepCellclass for backpropagation and gradient update. Finally, the training script should look like this:# define dataset dataset = ... # define backbone and loss backbone = Net() loss = NetLoss() # combine backbone and loss net_with_loss = WithLossCell(backbone, loss) # define optimizer opt = ... # combine forward and backward net_with_grad = TrainOneStepCell(net_with_loss, opt) # define model and train model = Model(net_with_grad) model.train(epoch_size, dataset)
PyTorch and mindspore have similar definitions of some basic APIs, such as mindspore.nn.SequentialCell and torch.nn.Sequential, In addition, some operator APIs may be not the same. This section lists some common API comparisons. For more information, see the MindSpore and PyTorch API mapping on Mindspore’s official website.
PyTorch |
MindSpore |
|---|---|
tensor.view() |
mindspore.ops.operations.Reshape()(tensor) |
tensor.size() |
mindspore.ops.operations.Shape()(tensor) |
tensor.sum(axis) |
mindspore.ops.operations.ReduceSum()(tensor, axis) |
torch.nn.Upsample[mode: nearest] |
mindspore.ops.operations.ResizeNearestNeighbor |
torch.nn.Upsample[mode: bilinear] |
mindspore.ops.operations.ResizeBilinear |
torch.nn.Linear |
mindspore.nn.Dense |
torch.nn.PixelShuffle |
mindspore.ops.operations.DepthToSpace |
It should be noticed that although torch.nn.MaxPool2d and mindspore.nn.MaxPool2d are similar in interface definition, Mindspore actually invokes the MaxPoolWithArgMax operator during training on Ascend. The function of this operator is the same as that of TensorFlow, during the migration, the MindSpore output after the MaxPool layer is inconsistent with that of PyTorch, theoretically, it’s not affect the final training result.